


可以编来玩一整天的有趣模型 >>> 简单两行Python代码让你的NaSch元胞动起来

多图预警!
最有趣的元胞自动机小知识,最实用的交通编程实战案例,最详细的代码讲解与分享。
元胞自动机 (Cellular Automata,CA)是20世纪50年代初由计算机之父冯·诺依曼(J.von Neumann)为了模拟生命系统所具有的自复制功能而提出来的。此后,史蒂芬·沃尔夫勒姆(Stephen Wolfram)对元胞自动机理论进行了深入的研究。例如,他对一维初等元胞机全部256种规则所产生的模型进行了深入研究,并将元胞自动机分为 平稳型 、 周期型 、 混沌型 和 复杂型 4 种类型。
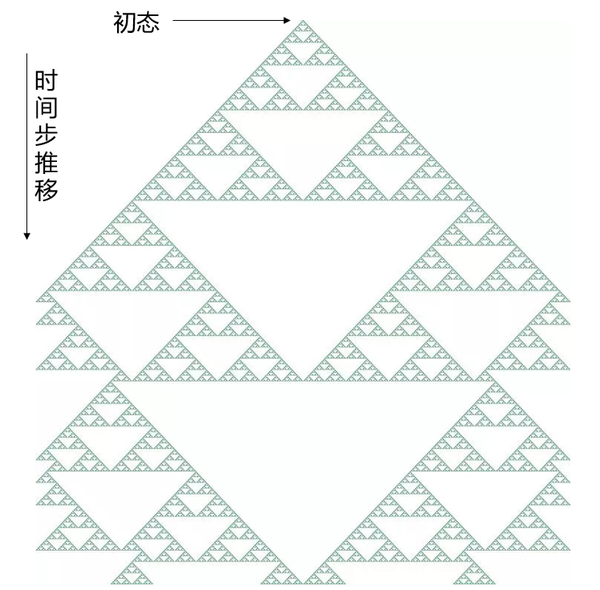
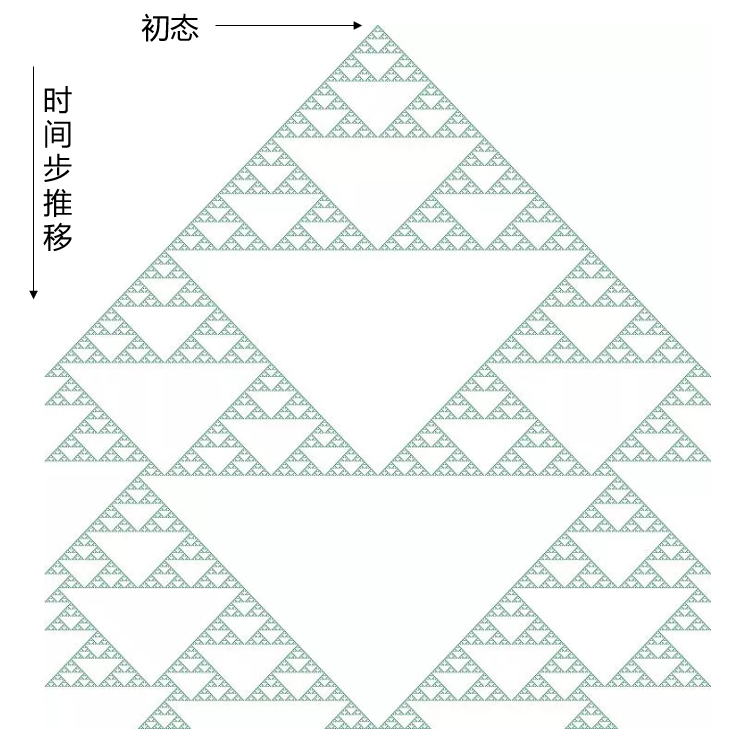
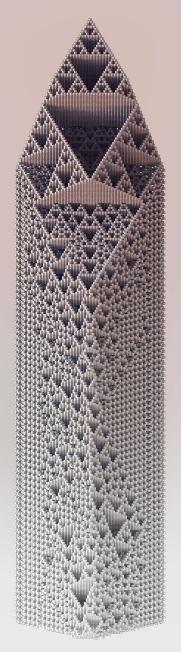
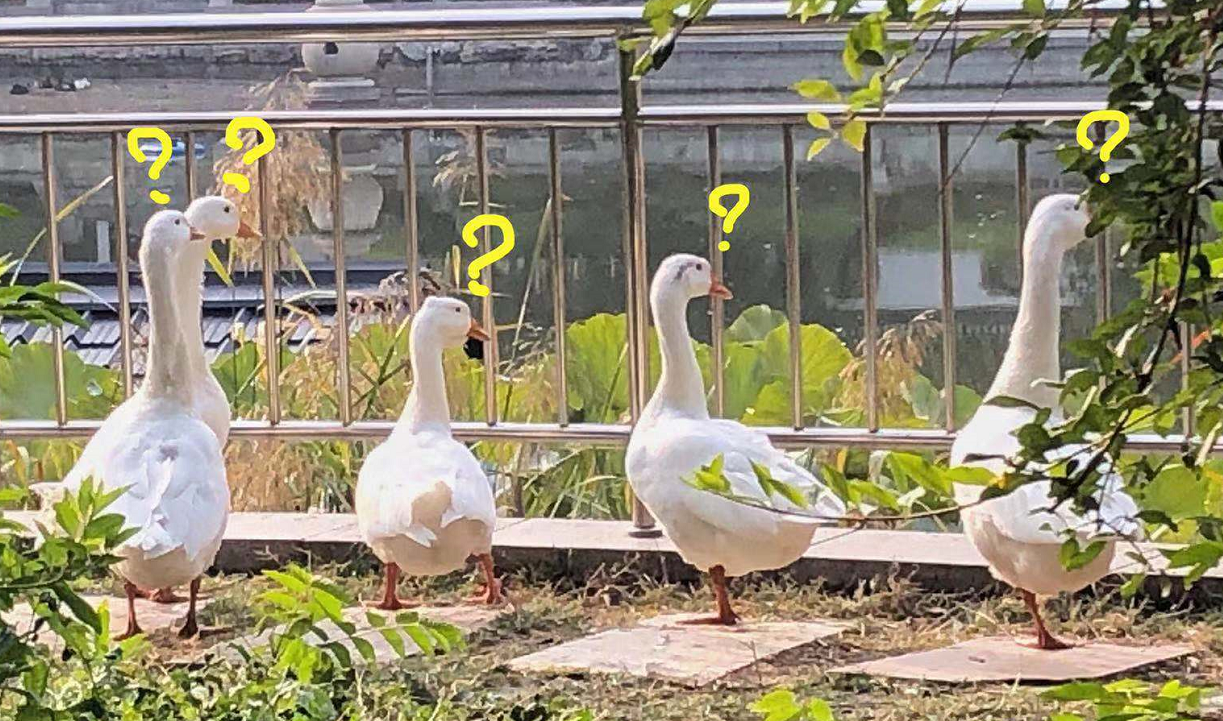
- 举个简单的例子,这是包含800个时间步的90号规则演化图案。虽然初始状态仅仅是一个点,但是随着时间的推移,简单的演化规则使图案分形,并在空间上形成了嵌套的三角形状。
那么,元胞自动机到底是什么呢?
简单来讲,
元胞自动机就是
采用离散的空间布局和时间间隔,
将元胞分成有限种状态,
元胞个体状态的演变,仅与其当前状态以及其某个局部邻域的状态有关。
元胞自动机以计算机建模和仿真的方法,研究类似于生物细胞(cell)的,由大量并行单元个体组成的复杂系统的宏观行为与规律。L-系统、格子气模型、格子气-Boltzmann方法、交通流模型等都是元胞自动机的具体化,有着重要的理论意义和实际应用价值。
元胞自动机的基本要素如下:
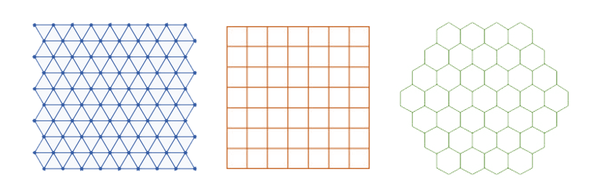
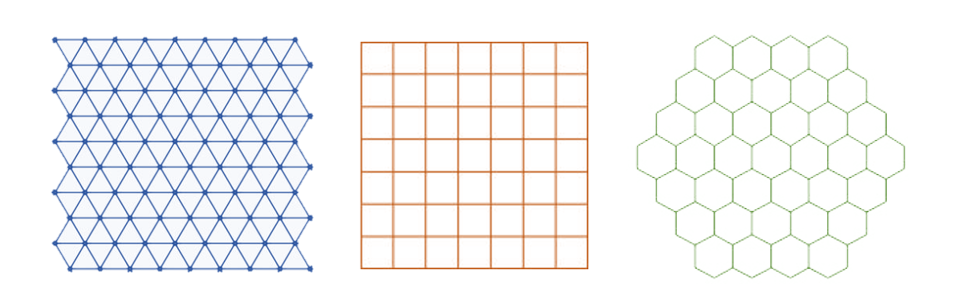
- 空间: 元胞在空间中分布的空间格点,可以是一维、二维或多维。
- 状态集: 可以是两种状态,用“生”、“死”,“0”、“1”,“黑”、“白”来表示;也可以是多种状态,如不同的颜色。
- 邻居: 存在与某一元胞周围,能影响该元胞在下一时刻的状态。
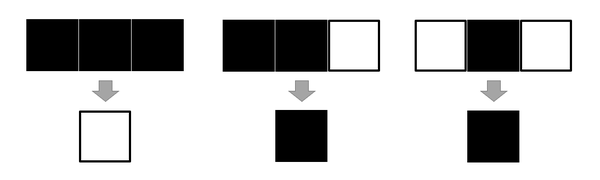
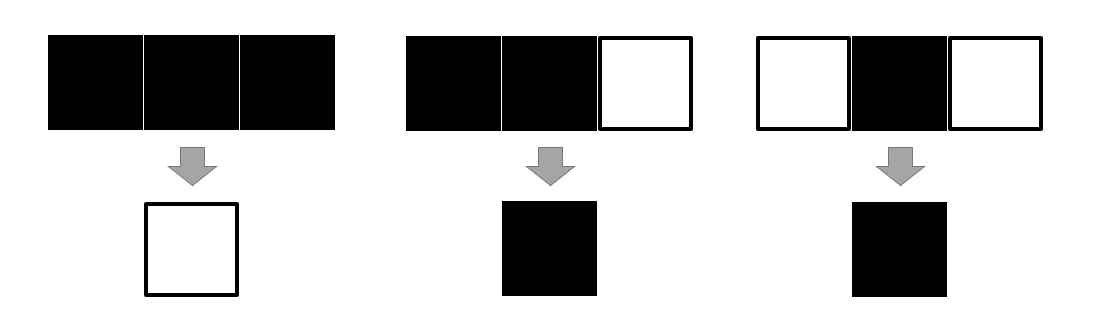
- 演化规则: 根据元胞及其邻居元胞的状态,决定下一时刻该元胞状态的动力学函数,也可以是状态转移方程。
- 这是一个算法生成的三维空间中的元胞自动机:
- 还有曾经火遍全世界的生命游戏
生命游戏(Game of Life),或者叫它的全称John Conway's Game of Life。是英国数学家约翰·康威在1970年代所发明的一种元胞自动机。
在二维平面上的方格细胞里,每个细胞有两种状态:死或活,而下一回合的状态完全受它周围8个细胞的状态而定。按照以下三条规则进行演化:
1. 活细胞周围的细胞数小于2个或多于3个则死亡;
2. 活细胞周围有2或3个细胞可以继续存活;
3. 死细胞周围恰好有3个细胞则会复活。
生命游戏虽然看起来简单,但经大佬们操作,真可谓出神入化!
明湖鹅们都震惊了!
可周期循环


可腾挪平移
可简单如宇宙飞船
可也复杂如模拟时钟
这是生命游戏的网页链接,一定要用电脑打开哦!
打开以后是Game of life的操作界面,简单拖拽鼠标创建初始状态,点击“开始”,系统就会自动按照生命游戏的规则进行演化。

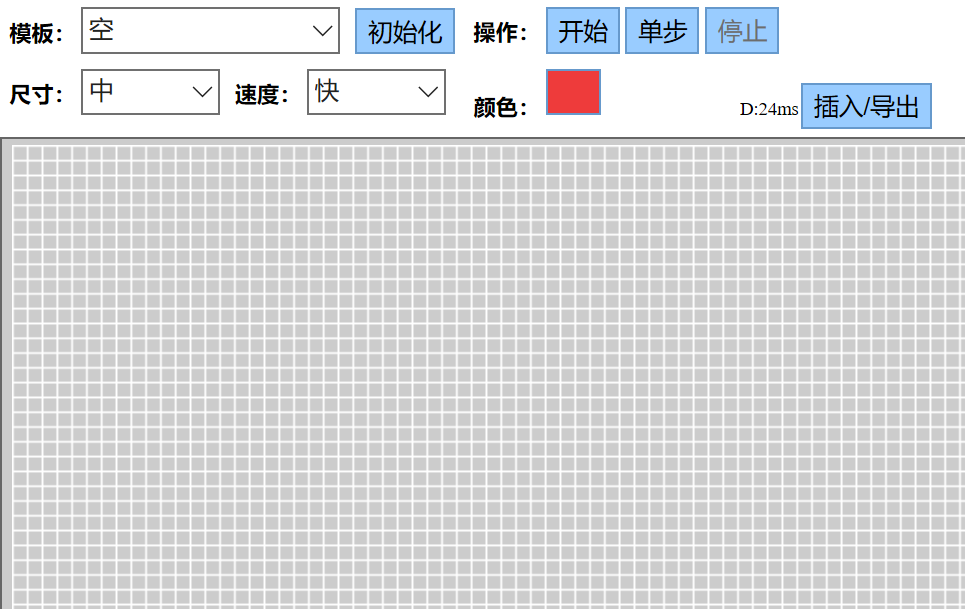
系统中还贴心地给了一系列“模板”,可谓手残党福利!
言归正传,让我们来谈谈 元胞自动机在交通领域的应用 。元胞自动机在我们交通领域应用非常广泛,常常被用来模拟道路上的车辆或移动的行人。
话不多说,直接上图。
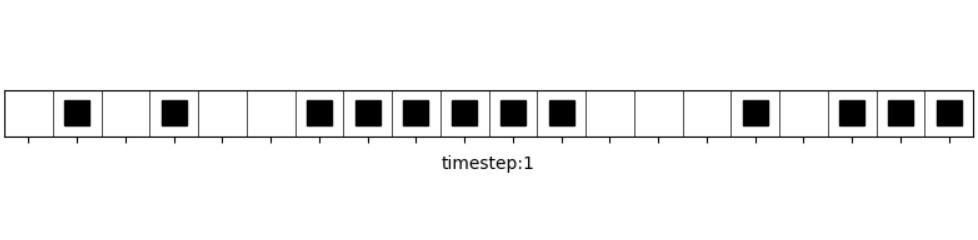
- 这是经典的NaSch模型,模拟了车辆在一维高速公路上的行驶状态
- 将CA模型推广到二维,可以仿真换道的行人流或车流
- 通过设置更复杂的规则,可以用元胞自动机仿真更真实的情况。例如在对向行走的行人流情境下,元胞们会仿真行人的排队特性,从而避免冲突相撞。
看到这里是不是有一点点小心动呢?
你也想编一个元胞自动机吗?
*****前方干货预警*****
我们以NaSch模型为例,用Python让它,动!起!来!
- 老规矩,先调包,并创建一个图像
import matplotlib as mpl
import matplotlib.pyplot as plt
import random
# 创建图像
fig = plt.figure(figsize=(10,1))
- 设置模型的参数,相当于一个遥控器,哪里不对点哪里~
# 模型参数设置
numofcell = 20 # 道路长度
numofcar = 12 # 空间中的车辆数
max_time = 100 # 设置最大时间步
max_speed = 5 # 允许的车辆最大速度
p_slowdown = 0.3 # 随机慢化概率
pause_time = 0.1 # 刷新时间(每一帧持续的时间)
cell_size = 15 # 元胞的大小
- 定义一个函数来构建一维空间,空间的长度就是道路长度,相当于用一系列和X轴或Y轴平行的直线,绘制一排小网格,每个小网格的中心,相当于(i,0),其中,i=1,2,…,numofcell
# 函数:构建一维空间
def Plot_Space():
for i in range(1, numofcell): plt.plot([i-0.5, i-0.5], [-0.5, 0.5], '-k', linewidth = 0.5)
plt.axis([-0.5, numofcell-0.5, -0.5, 0.5])
plt.xticks([]);plt.yticks([])


- 定义一个函数来获取和前车的距离,从而避免两车相撞。在这里采用了周期性边界,即从道路末端驶出的小车会重新回到起点,相当于一个环路。
# 函数:获取和前车的距离
def get_empty_front(link, numofcell, indexofcell):
link2 = link * 2 # 周期性边界
num = 0; i = 1
while (link2[indexofcell + i]) == None:
num += 1; i += 1
return num
- 在道路空间中随机生成numofcar个初始元胞,并赋予随机的初始速度(不大于已经设置好的最大速度)。道路被车辆占有的状态储存在列表link中,若元胞中没有车辆,则link对应的位置为“None”;若元胞中有车,link对应的位置储存车辆的速度。(可以开开脑洞,大胆地尝试不同初始状态噢)
# 随机生成初始元胞
Plot_Space()
link = [None] * numofcell
num = 0
while num != numofcar:
sj = random.randint(0, numofcell - 1)
if link[sj] == None:
link[sj] = random.randint(0, 5)
num += 1
- 在0~max_time的时间步内,进行NaSch模型的演化,模型演化的四个步骤:
加速: 若还没到速度最大值,速度就加1
减速: 如果速度值大于前方的空元胞数,有撞车风险,则减速至前方的空元胞数目
随机慢化: 司机以p_slowdown的概率随机踩刹车,使速度减1
位置更新: 新的位置为当前位置+当前速度,同时更新所有车辆的位置
# NaSch模型
for t in range(0, max_time):
for cell in range(0, numofcell):
if link[cell] != None:
link[cell] = min(link[cell] + 1, max_speed)
link[cell] = min(link[cell], get_empty_front(link, numofcell, cell))
# 随机慢化
if random.random() <= p_slowdown:
link[cell] = max(link[cell] - 1, 0)
# 位置更新
nlink = [None] * numofcell
for cell in range(0, numofcell):
if link[cell] != None:
new_index = cell + link[cell]
if new_index >= numofcell:
new_index -= numofcell
nlink[new_index] = link[cell]
link = nlink
- 绘制当前时间步车辆位置的图像,注意这里有缩进,说明上一段NaSch模型演化代码中的for循环还没有结束呦~
x1 = []
for i in range(0,len(link)):