


3D点云可视化
更新时间:
复制为 MD 格式
本实验介绍 jupyter notebook 中运行的 3D 点云可视化代码
场景简介
-
本实验介绍:jupyter notebook 中运行的 3D 点云可视化代码
实验室资源方式简介
进入实操前,请确保阿里云账号满足以下条件:
-
个人账号资源
-
使用您个人的云资源进行操作,资源归属于个人。
-
平台仅提供手册参考,不会对资源做任何操作。
-
-
确保已完成云工开物 300 元代金券领取。
-
已通过实名认证且账户余额≥100 元。
本次实验将在您的账号下开通实操所需计算型实例规格族 c7a,费用约为:25 元(以实验时长 2 小时预估,具体金额取决于实验完成的时间),需要您通过阿里云云工开物学生专属 300 元抵扣金兑换本次实操的云资源。
如果您调整了资源规格、使用时长,或执行了本方案以外的操作,可能导致费用发生变化,请以控制台显示的实际价格和最终账单为准。
领取专属权益及创建实验资源
在开始实验之前,请先点击右侧屏幕的“进入实操”再进行后续操作

领取 300 元高校专属权益优惠券 (若已领取请跳过)
重要
实验产生的费用优先使用优惠券,优惠券使用完毕后需您自行承担。

实验步骤
-
1、 服务部署
-
点击链接 ,进入部署页面
-
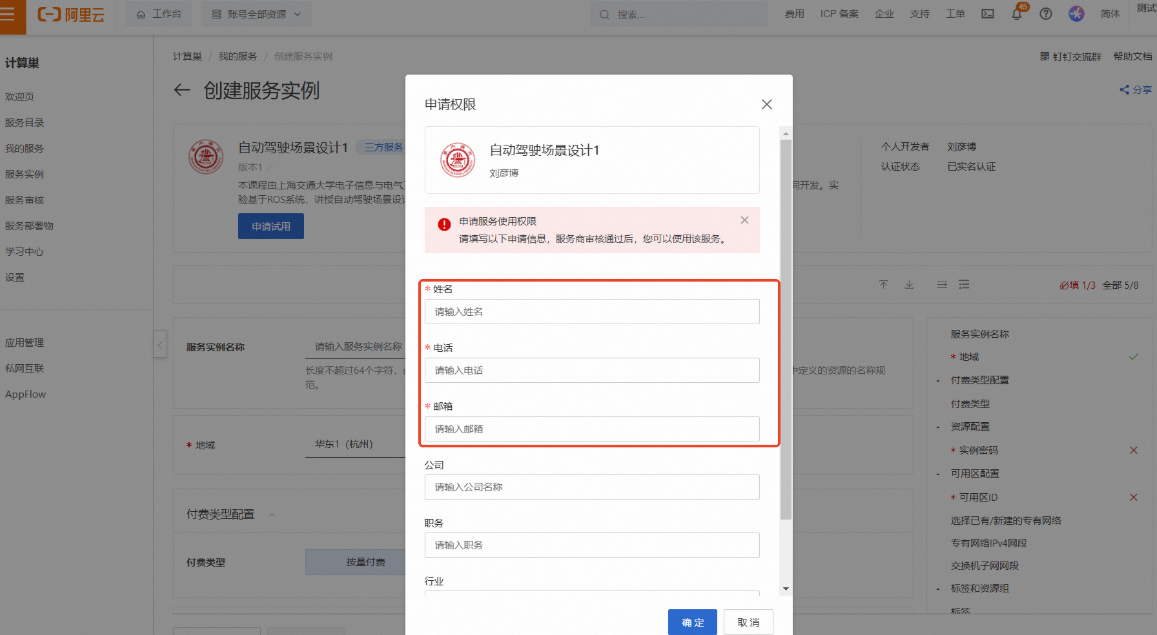
按弹窗提示进行 权限申请 。其中【姓名】、【电话】、【邮箱】为必填项,完成填写后点击 【确定】
说明请填写您的学校邮箱(.edu),便于审核
-
提交申请后将提示
-
当申请通过后,将会收到短信提示可以进行部署

-
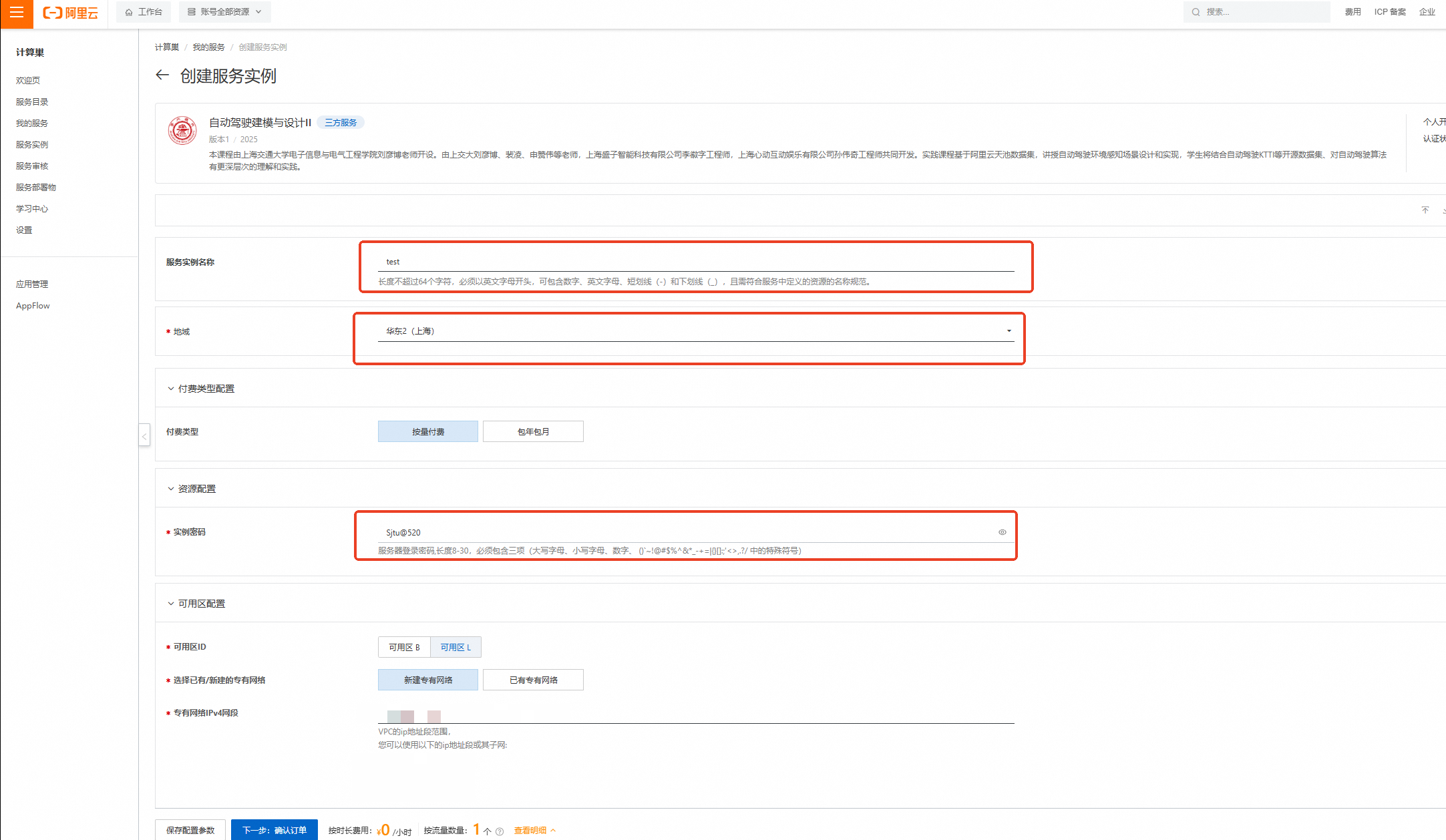
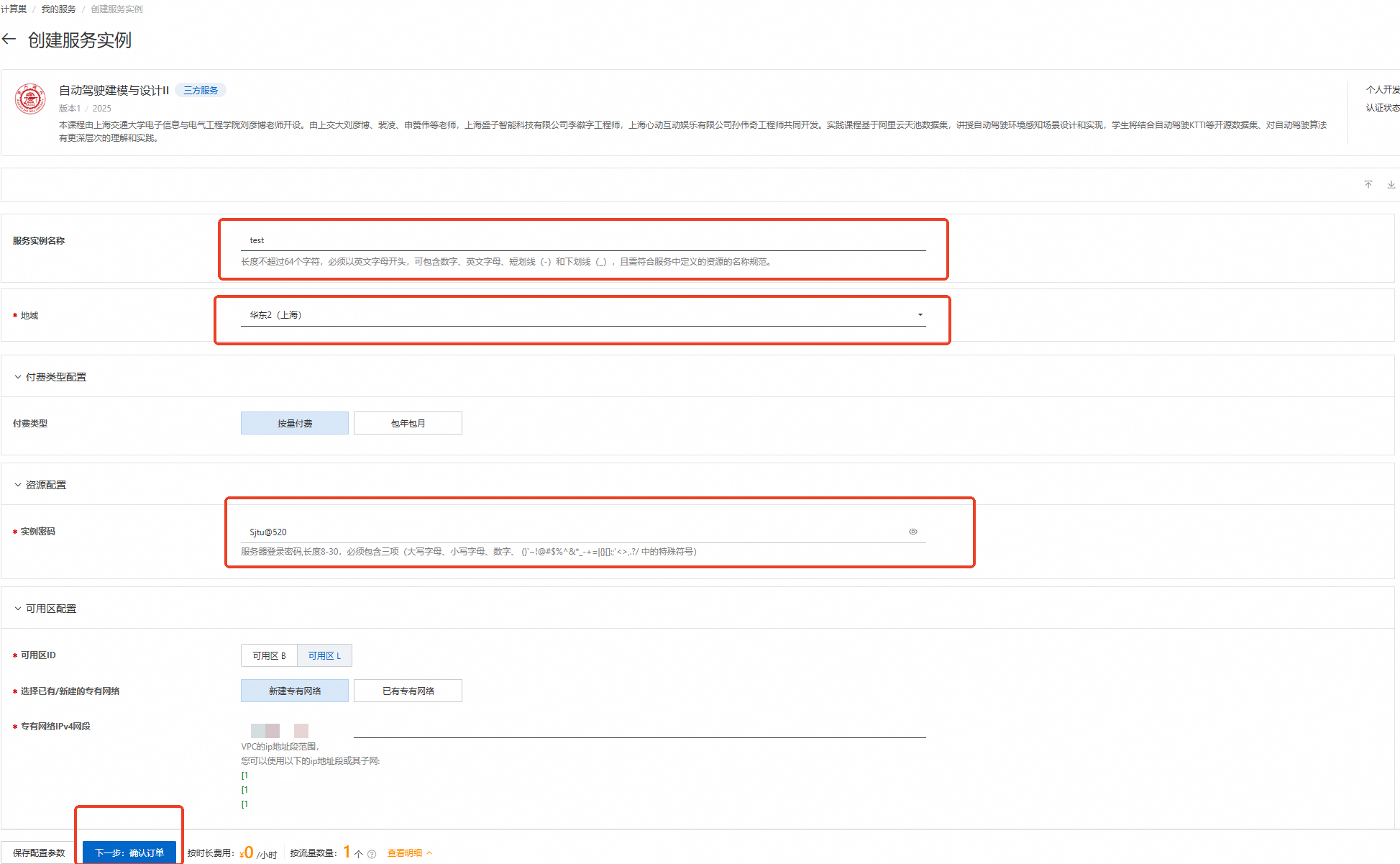
刷新 部署页面 ,按下图设置【服务实例名称】、【地域】、【实例密码】
-
服务实例名称: test (可自定义命名)
-
地域 : 华东 2(上海)
-
实例密码: Sjtu@520
说明输入实例密码时请注意大小写,请记住您设置的实例名称及对应密码,后续实验过程会用到。

-
-
完成填写后点击 【下一步:确认订单】
-
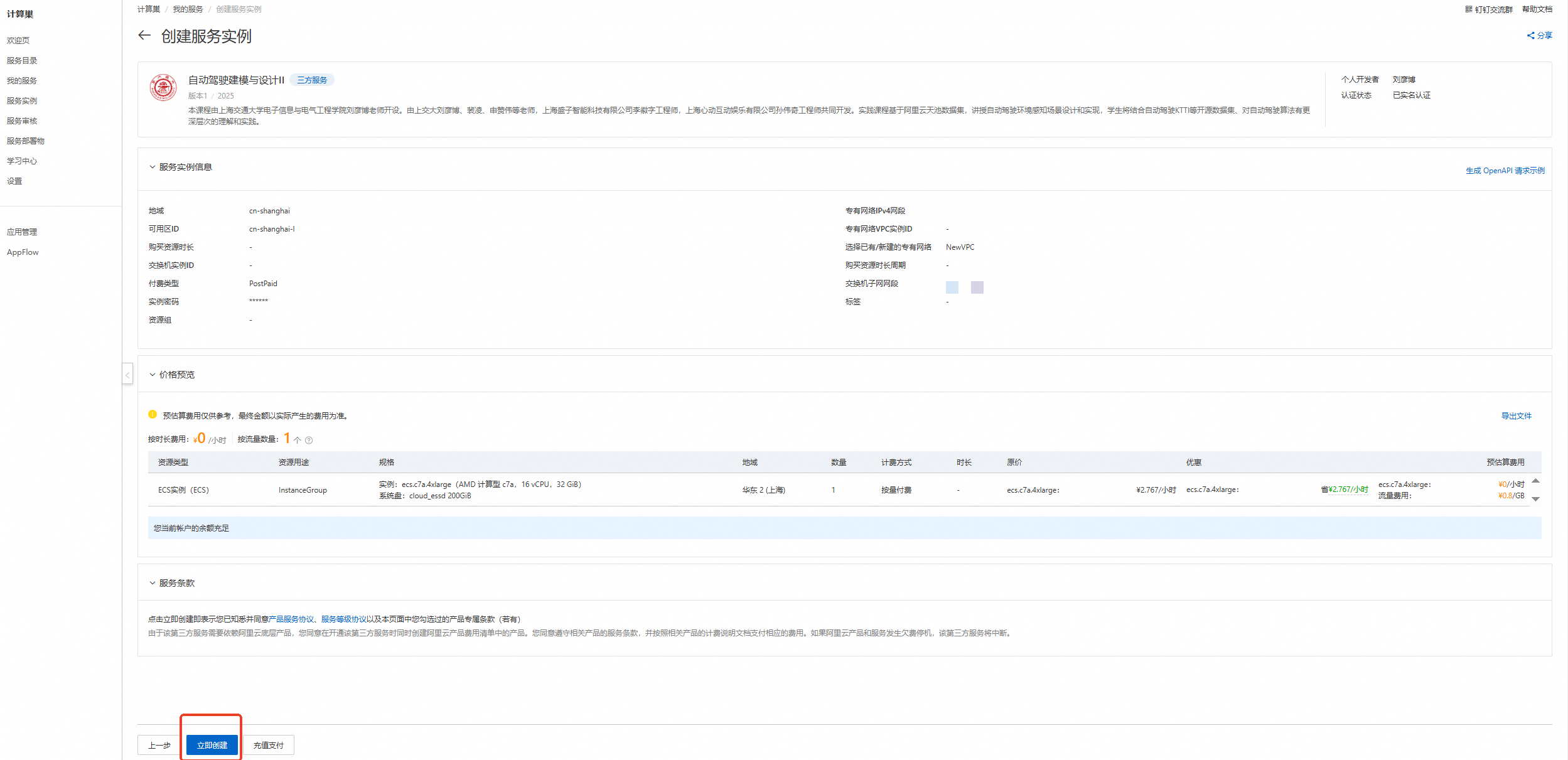
核对实例信息及价格预览, 无误 请点击 【立即创建】
重要领取 300 元优惠券后,资源应为 0 元/小时,且会提示【您当前账户的余额充足】!若提示余额不足等,请检查是否正确领取优惠券
-
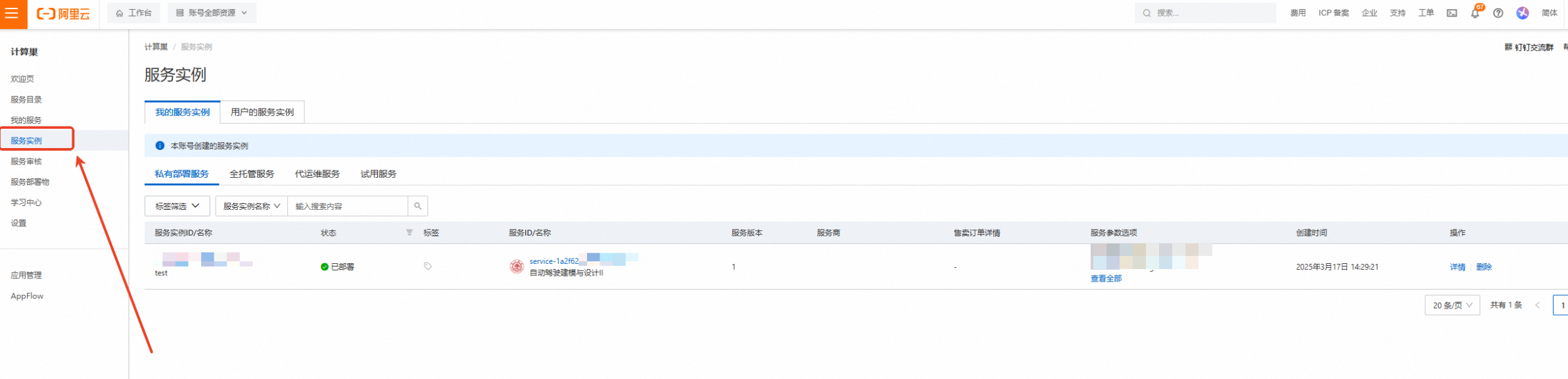
创建成功,点击 【去列表查看】
-
查看实例,点击 左侧 的图标 展开目录
选择目录中的【云服务器 ECS】
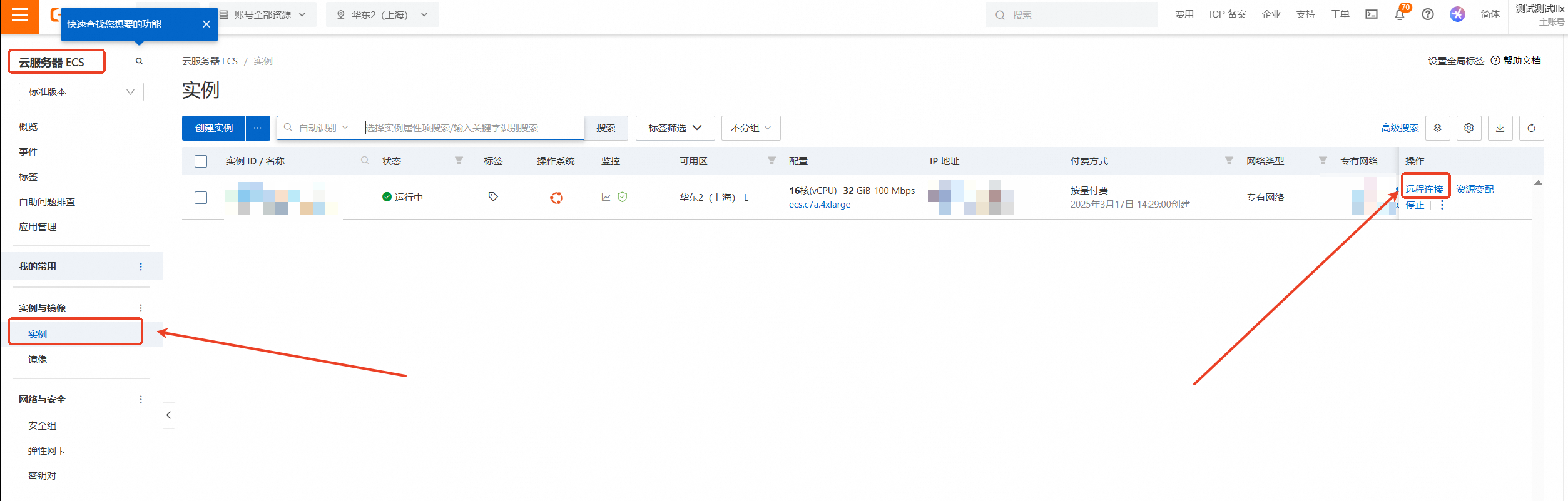
-
云服务器 ECS—实例—远程连接
-
下拉展开更多登录方式,选择【通过 VNC 远程连接】
-
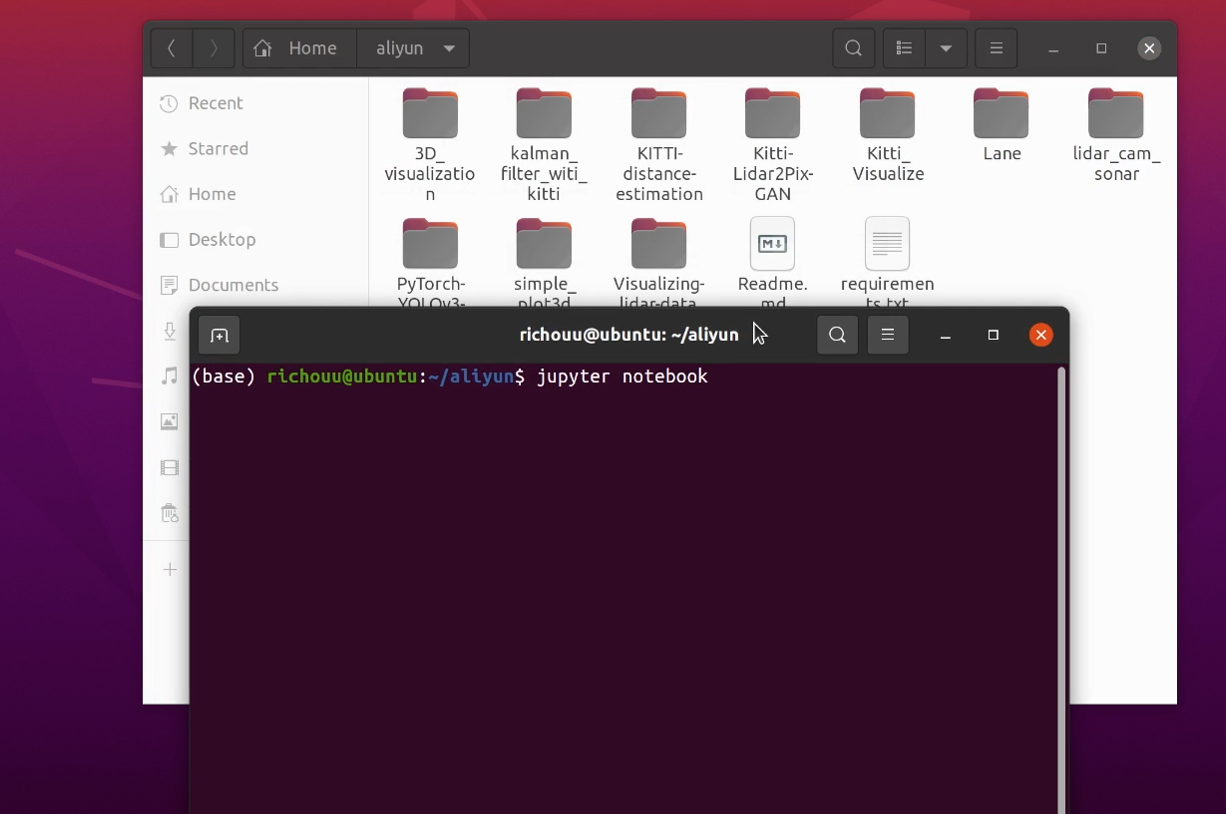
输入 实例密码: Sjtu@520( 请输入您设置的密码 ) 后回车
-
进入 Ubuntu20.04 系统后打开 aliyun 文件夹,在文件夹中右键开启终端并输入 /jupyter notebook 命令,用户名前面的(base)表示此时处于 anaconda 的 base 环境中
-
-
2、打开文件并运行
在自动弹出的浏览器页面中选择/simple_plot3d/3D 点云可视化.ipynb 并打开
点击此选项可按步运行
-
3、 导入相关依赖
import os import os.path as osp import time import numpy as np import cv2 import matplotlib import matplotlib.pyplot as plt import sys sys.path.append("/home/ecs-user/aliyun/simple_plot3d") print(sys.path) #from simple_plot3d import Canvas_3D, Canvas_BEV from simple_plot3d.canvas_3d import Canvas_3D from simple_plot3d.canvas_bev import Canvas_BEV from IPython.core.display import display, HTML display(HTML("<style>.container { width:80% !important; }</style>")) -
4、 加载 KITTI 数据
加载 KITTI 数据集中的校准,标签,图像以及点云数据。
# 加载Calib def _extend_matrix(mat): mat = np.concatenate([mat, np.array([[0., 0., 0., 1.]])], axis=0) return mat calib_lines = open("/home/ecs-user/aliyun/simple_plot3d/data/000008_calib.txt", 'r').readlines() P2 = _extend_matrix(np.array([float(info) for info in calib_lines[2].split(' ')[1:13]]).reshape([3, 4])) Tr_velo_to_cam = _extend_matrix(np.array([float(info) for info in calib_lines[5].split(' ')[1:13]]).reshape([3, 4])) R0_rect = np.array([float(info) for info in calib_lines[4].split(' ')[1:10]]).reshape([3, 3]) rect_4x4 = np.zeros([4, 4], dtype=R0_rect.dtype) rect_4x4[3, 3] = 1. rect_4x4[:3, :3] = R0_rect R0_rect = rect_4x4 # 加载Labels label_lines = open("/home/ecs-user/aliyun/simple_plot3d/data/000008_label_2.txt", 'r').readlines() label_lines = [line.strip().split(' ') for line in label_lines] gt_names = np.array([x[0] for x in label_lines]) gt_dims = np.array([[float(info) for info in x[8:11]] for x in label_lines]).reshape(-1, 3)[:, [2, 0, 1]] gt_locs = np.array([[float(info) for info in x[11:14]] for x in label_lines]).reshape(-1, 3) gt_rots = np.array([float(x[14]) for x in label_lines]).reshape(-1) gt_bboxes_3d = np.concatenate([gt_locs, gt_dims, gt_rots[..., np.newaxis]], axis=1).astype(np.float32) care_mask = gt_names != 'DontCare' gt_names = gt_names[care_mask] gt_bboxes_3d = gt_bboxes_3d[care_mask] # 加载Image img = cv2.imread("/home/ecs-user/aliyun/simple_plot3d/data/000008_image_2.png")[..., ::-1] # BGR to RGB # 加载Point Cloud pts_xyz = np.fromfile("/home/ecs-user/aliyun/simple_plot3d/data/000008_velodyne.bin", dtype=np.float32).reshape(-1, 4)[:, :3] # drop reflectance将 KITTI 3D 框从相机坐标转换为雷达坐标。
gt_lidar_dims = np.concatenate([gt_bboxes_3d[:, [5]], gt_bboxes_3d[:, [3]], gt_bboxes_3d[:, [4]]], axis=1) gt_locs_hom = np.concatenate([gt_bboxes_3d[:, :3], np.ones((gt_bboxes_3d.shape[0], 1))], axis=1) gt_lidar_locs = gt_locs_hom @ np.linalg.inv(Tr_velo_to_cam.T) @ np.linalg.inv(R0_rect.T) gt_lidar_bboxes_3d = np.concatenate([gt_lidar_locs[:, :3], gt_lidar_dims, gt_bboxes_3d[:, [6]]], axis=1)获取图像中可见点的 RGB 值。
pts_hom = np.concatenate([pts_xyz, np.ones((len(pts_xyz), 1))], axis=1) pts_img = pts_hom @ Tr_velo_to_cam.T @ R0_rect.T @ P2.T pts_img[:, 0] /= pts_img[:, 2] pts_img[:, 1] /= pts_img[:, 2] pts_img = pts_img.round().astype(np.int32) in_image_mask = ((pts_img[:, 2] > 0.1) & (pts_img[:, 0] > 0) & (pts_img[:, 0] < img.shape[1]) & (pts_img[:, 1] > 0) & (pts_img[:, 1] < img.shape[0])) pts_xyz_img = pts_xyz[in_image_mask] pts_img = pts_img[in_image_mask] pts_rgb = img[pts_img[:, 1], pts_img[:, 0]] -
5、 Barebones 可视化(鸟瞰图)
在鸟瞰图上识别物体,绘制 2D 边框并标注标签。
canvas_bev = Canvas_BEV(canvas_shape=(1000, 1000), canvas_x_range=(0, 30), canvas_y_range=(-15, 15)) canvas_xy, valid_mask = canvas_bev.get_canvas_coords(pts_xyz) # Get Canvas Coords canvas_bev.draw_canvas_points(canvas_xy[valid_mask]) # Only draw valid points canvas_bev.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names) # Draw Boxes plt.figure(figsize=(20, 20)); plt.axis('off') plt.imshow(canvas_bev.canvas) plt.tight_layout() plt.savefig("/home/ecs-user/aliyun/simple_plot3d/output/canvas_bev_barebones.png", transparent=False)
-
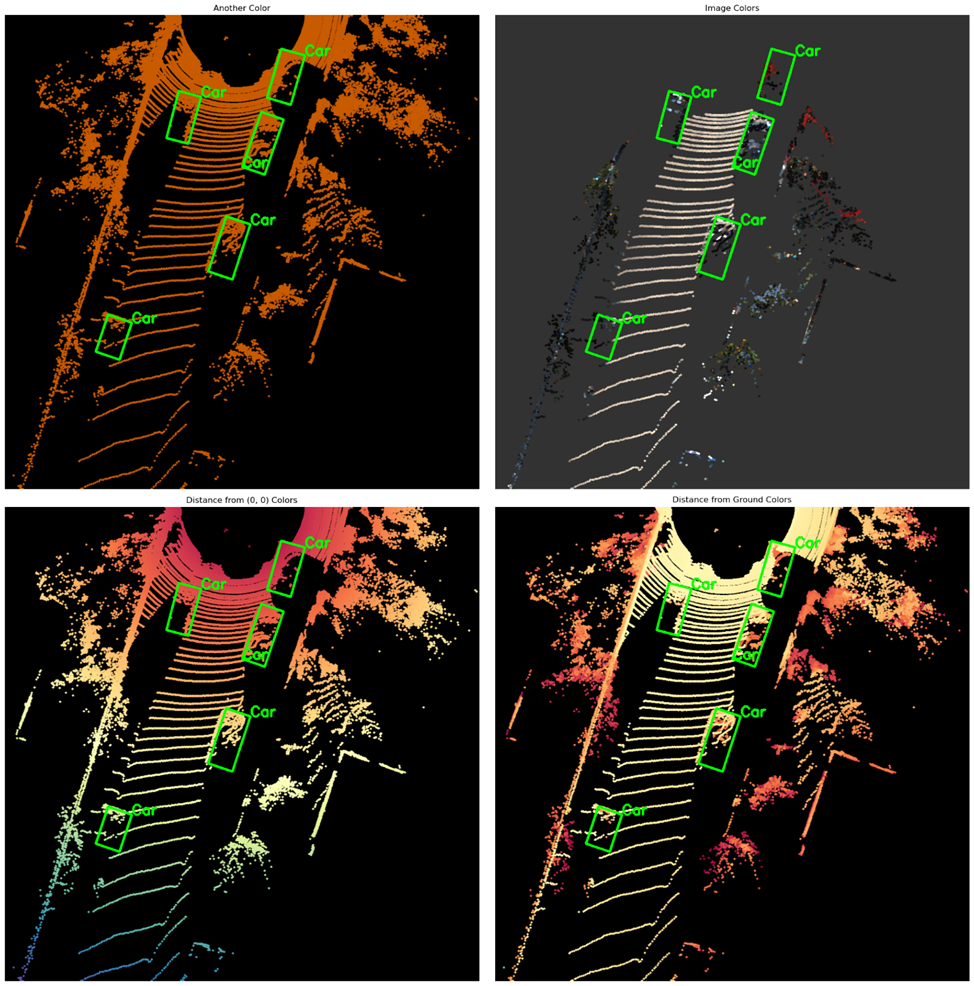
6、 各种颜色类型(鸟瞰图)
在鸟瞰图上添加颜色,识别物体绘制 2D 边框并标注标签。
fig, axes = plt.subplots(2, 2, figsize=(20, 20)) axes[0, 0].set_title("Another Color") canvas_bev = Canvas_BEV(canvas_shape=(1000, 1000), canvas_x_range=(0, 30), canvas_y_range=(-15, 15)) canvas_xy, valid_mask = canvas_bev.get_canvas_coords(pts_xyz) canvas_bev.draw_canvas_points(canvas_xy[valid_mask], colors=(200, 90, 0), radius=2) canvas_bev.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names, colors=(0, 255, 0), box_line_thickness=3, box_text_size=1) axes[0, 0].imshow(canvas_bev.canvas) axes[0, 0].axis('off') axes[0, 1].set_title("Image Colors") canvas_bev = Canvas_BEV(canvas_shape=(1000, 1000), canvas_x_range=(0, 30), canvas_y_range=(-15, 15), canvas_bg_color=(50, 50, 50)) canvas_xy, valid_mask = canvas_bev.get_canvas_coords(pts_xyz_img) canvas_bev.draw_canvas_points(canvas_xy[valid_mask], colors=pts_rgb[valid_mask], radius=2) canvas_bev.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names, colors=(0, 255, 0), box_line_thickness=3, box_text_size=1) axes[0, 1].imshow(canvas_bev.canvas) axes[0, 1].axis('off') axes[1, 0].set_title("Distance from (0, 0) Colors") canvas_bev = Canvas_BEV(canvas_shape=(1000, 1000), canvas_x_range=(0, 30), canvas_y_range=(-15, 15)) canvas_xy, valid_mask = canvas_bev.get_canvas_coords(pts_xyz) canvas_bev.draw_canvas_points(canvas_xy[valid_mask], colors='Spectral', radius=2) canvas_bev.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names, colors=(0, 255, 0), box_line_thickness=3, box_text_size=1) axes[1, 0].imshow(canvas_bev.canvas) axes[1, 0].axis('off') axes[1, 1].set_title("Distance from Ground Colors") canvas_bev = Canvas_BEV(canvas_shape=(1000, 1000), canvas_x_range=(0, 30), canvas_y_range=(-15, 15)) canvas_xy, valid_mask = canvas_bev.get_canvas_coords(pts_xyz) # Here, you can make colors_operand positive or negative to flip the cmap as you want canvas_bev.draw_canvas_points(canvas_xy[valid_mask], colors='Spectral', colors_operand=-pts_xyz[:, 2][valid_mask], radius=2) canvas_bev.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names, colors=(0, 255, 0), box_line_thickness=3, box_text_size=1) axes[1, 1].imshow(canvas_bev.canvas) axes[1, 1].axis('off') plt.tight_layout() plt.savefig("/home/ecs-user/aliyun/simple_plot3d/output/canvas_bev_various_colors.png", transparent=False)
-
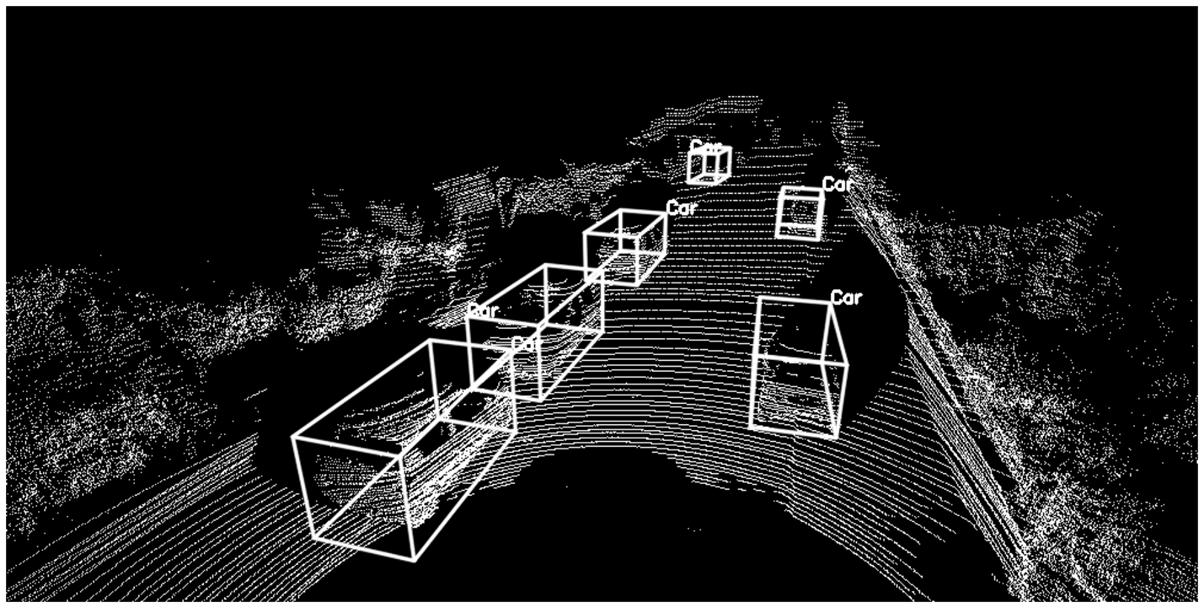
7、 Barebones 可视化(3D 图)
在 3D 图上识别物体,绘制 3D 边框并标注标签。
canvas_bev = Canvas_3D() canvas_xy, valid_mask = canvas_bev.get_canvas_coords(pts_xyz) canvas_bev.draw_canvas_points(canvas_xy[valid_mask]) canvas_bev.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names) plt.figure(figsize=(20, 20)); plt.axis('off') plt.imshow(canvas_bev.canvas) plt.tight_layout() plt.savefig("/home/ecs-user/aliyun/simple_plot3d/output/canvas_3d_barebones.png", transparent=False)
-
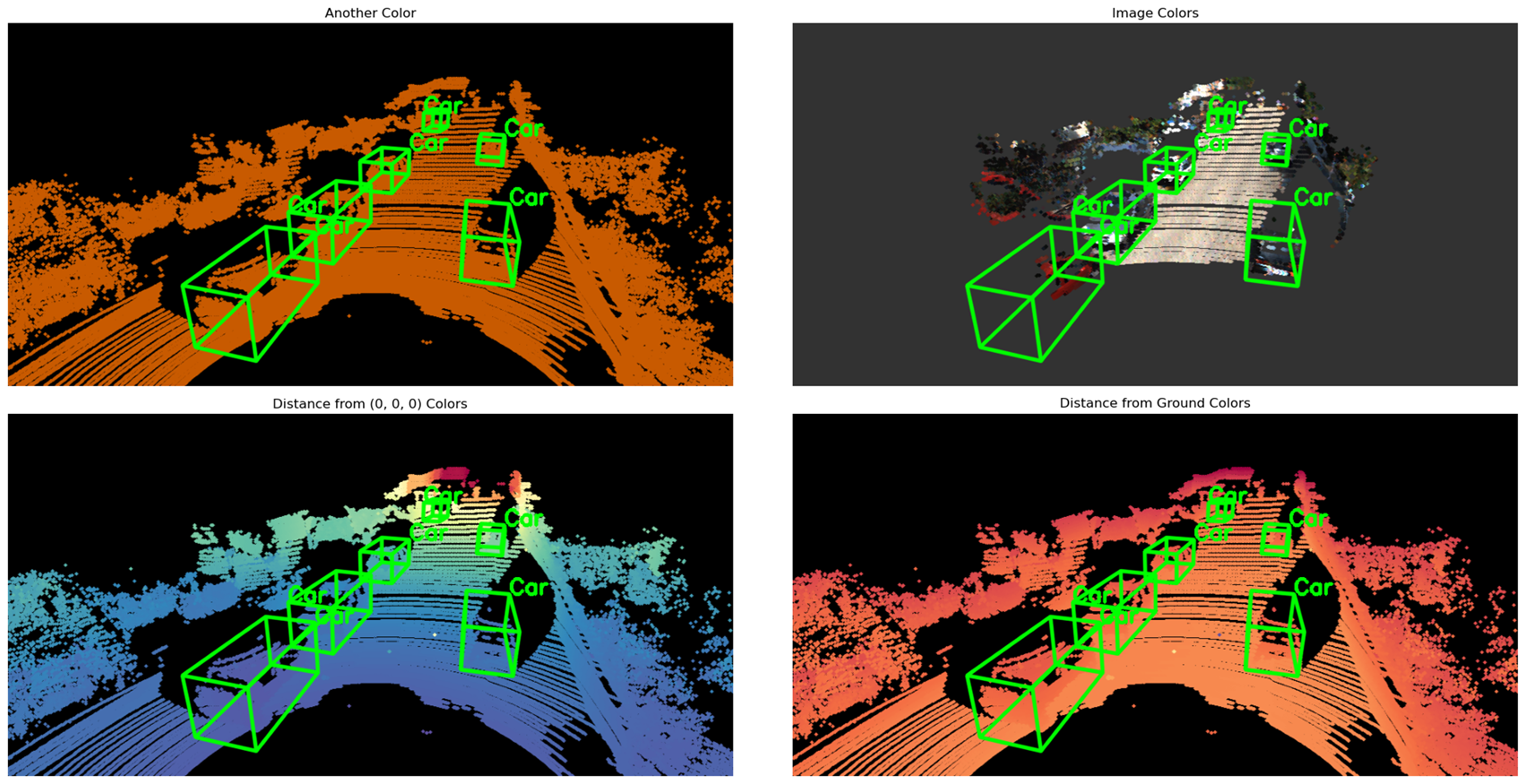
8、 各种颜色类型(3D 图)
在 3D 图上添加颜色,识别物体绘制 3D 边框并标注标签。
fig, axes = plt.subplots(2, 2, figsize=(20, 10)) axes[0, 0].set_title("Another Color") canvas_3d = Canvas_3D() canvas_xy, valid_mask = canvas_3d.get_canvas_coords(pts_xyz) canvas_3d.draw_canvas_points(canvas_xy[valid_mask], colors=(200, 90, 0), radius=2) canvas_3d.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names, colors=(0, 255, 0), box_line_thickness=3, box_text_size=1) axes[0, 0].imshow(canvas_3d.canvas) axes[0, 0].axis('off') axes[0, 1].set_title("Image Colors") canvas_3d = Canvas_3D(canvas_bg_color=(50, 50, 50)) canvas_xy, valid_mask = canvas_3d.get_canvas_coords(pts_xyz_img) canvas_3d.draw_canvas_points(canvas_xy[valid_mask], colors=pts_rgb[valid_mask], radius=2) canvas_3d.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names, colors=(0, 255, 0), box_line_thickness=3, box_text_size=1) axes[0, 1].imshow(canvas_3d.canvas) axes[0, 1].axis('off') axes[1, 0].set_title("Distance from (0, 0, 0) Colors") canvas_3d = Canvas_3D() canvas_xy, valid_mask = canvas_3d.get_canvas_coords(pts_xyz) canvas_3d.draw_canvas_points(canvas_xy[valid_mask], colors='Spectral', colors_operand=-np.linalg.norm(pts_xyz[valid_mask], axis=1), radius=2) canvas_3d.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names, colors=(0, 255, 0), box_line_thickness=3, box_text_size=1) axes[1, 0].imshow(canvas_3d.canvas) axes[1, 0].axis('off') axes[1, 1].set_title("Distance from Ground Colors") canvas_3d = Canvas_3D() canvas_xy, valid_mask = canvas_3d.get_canvas_coords(pts_xyz) canvas_3d.draw_canvas_points(canvas_xy[valid_mask], colors='Spectral', colors_operand=-pts_xyz[:, 2][valid_mask], radius=2) canvas_3d.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names, colors=(0, 255, 0), box_line_thickness=3, box_text_size=1) axes[1, 1].imshow(canvas_3d.canvas) axes[1, 1].axis('off') plt.tight_layout() plt.savefig("/home/ecs-user/aliyun/simple_plot3d/output/canvas_3d_various_colors.png", transparent=False)
-
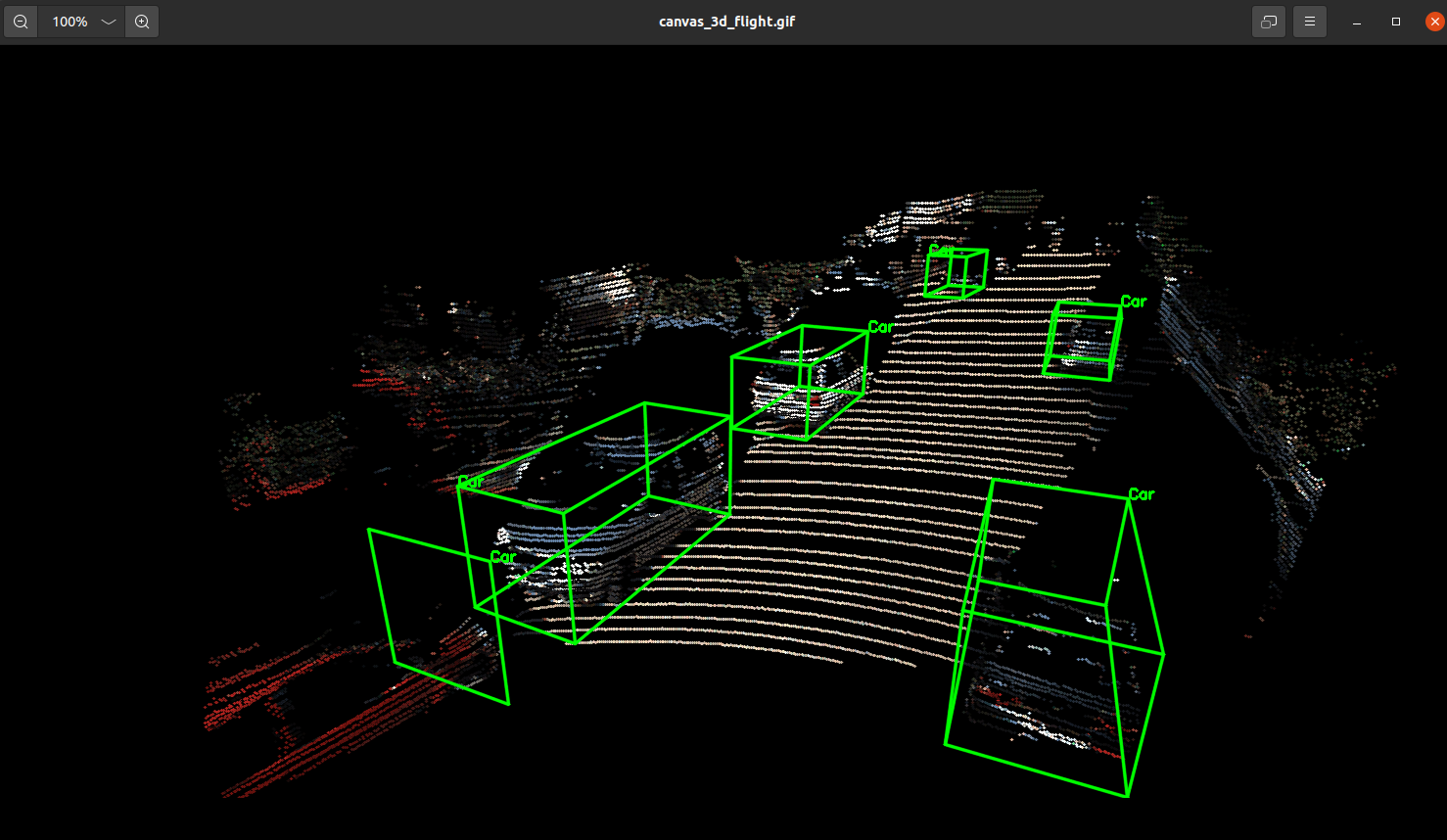
9、 移动相机用例
在 3D 图上添加颜色,识别物体绘制 3D 边框并标注标签。并且将一连串的图片合并制作为 GIF 图片并保存在本地。
def sph2cart(az, el, r): rcos_theta = r * np.cos(el) x = rcos_theta * np.cos(az) y = rcos_theta * np.sin(az) z = r * np.sin(el) return x, y, z def view_sph_to_cart(az, el): x, y, z = sph2cart(az, el, 1) return x, y, z def get_flight_path(num_frames=100, start_camera_loc=[-4, 0, 4], end_camera_loc=[60, 0, 4]): start_camera_loc = np.array(start_camera_loc) end_camera_loc = np.array(end_camera_loc) num_sweeps = 2 max_sweep_viewing_az = np.pi / 12 # 15 degrees fixed_el = -np.pi / 9 # -20 deg # Get list of all camera centers and camera focuses normalized_timesteps = np.arange(num_frames) / num_frames camera_centers = ((end_camera_loc - start_camera_loc) * normalized_timesteps[:, None]) + start_camera_loc # N x 3 # For sweeps, going to use sin function. sweep_sample_locations_target = np.linspace(0, num_sweeps * (2 * np.pi), num_frames) sweep_sample_interpolate = np.linspace(0, num_sweeps * (2 * np.pi), 4 * num_sweeps + 1) locations_to_interpolate_between = np.sin(sweep_sample_interpolate) sweep_norm_angles = np.interp(sweep_sample_locations_target, sweep_sample_interpolate, locations_to_interpolate_between) sweep_az_angles = max_sweep_viewing_az * sweep_norm_angles camera_focus_relative_cart = np.stack([*view_sph_to_cart( sweep_az_angles, np.full_like(sweep_az_angles, fixed_el) )], axis=1) # N x 3 camera_focus = camera_centers + camera_focus_relative_cart return camera_centers, camera_focus video_frames = [] num_frames = 300 start_time = time.time() for flight_camera_center, flight_camera_focus in zip(*get_flight_path(num_frames, start_camera_loc=[-4, 0, 3], end_camera_loc=[50, -20, 3])): curr_canvas_3d = Canvas_3D(canvas_shape=(720, 1440), camera_center_coords=flight_camera_center, camera_focus_coords=flight_camera_focus) canvas_xy, valid_mask = curr_canvas_3d.get_canvas_coords(pts_xyz_img) curr_canvas_3d.draw_canvas_points(canvas_xy[valid_mask], colors=pts_rgb[valid_mask], radius=1) curr_canvas_3d.draw_boxes(gt_lidar_bboxes_3d, texts=gt_names, colors=(0, 255, 0), box_line_thickness=2, box_text_size=0.5) video_frames.append(curr_canvas_3d.canvas) print("Took {:.2f} seconds for {} frames".format(time.time() - start_time, num_frames)) from moviepy import ImageSequenceClip from IPython.display import HTML clip = ImageSequenceClip(list(video_frames), fps=30) clip.write_gif("/home/ecs-user/aliyun/simple_plot3d/output/canvas_3d_flight.gif", fps=30, logger=None) clip根据路径,生成的 GIF 文件可以在/home/aliyun/simple_plot3d/output 中找到。
点开 canvas_3d_flight.gif 可以查看生成的结果。





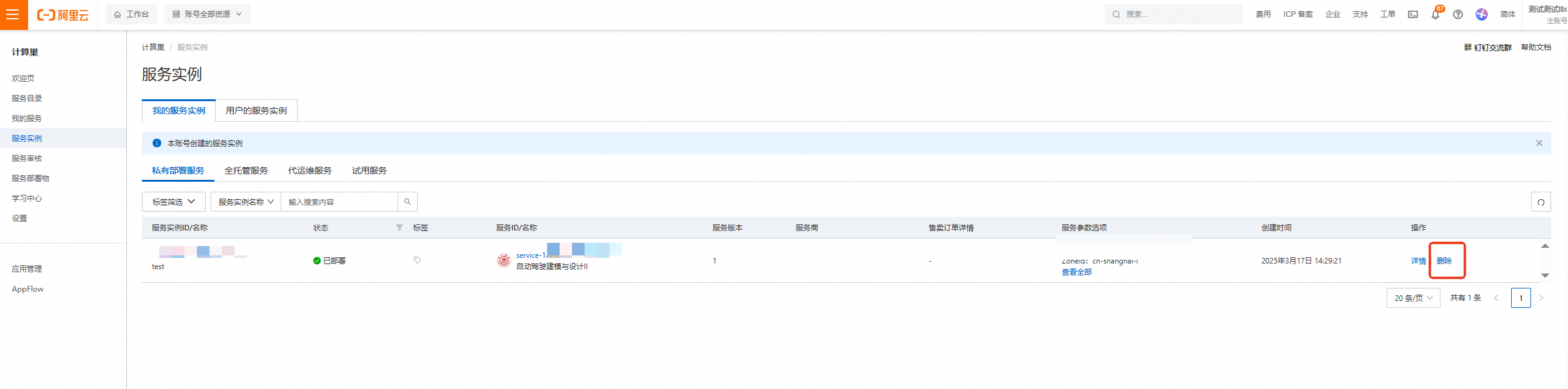
清理资源
-
计算巢—服务实例—复制服务实例 ID,点击【删除】
-
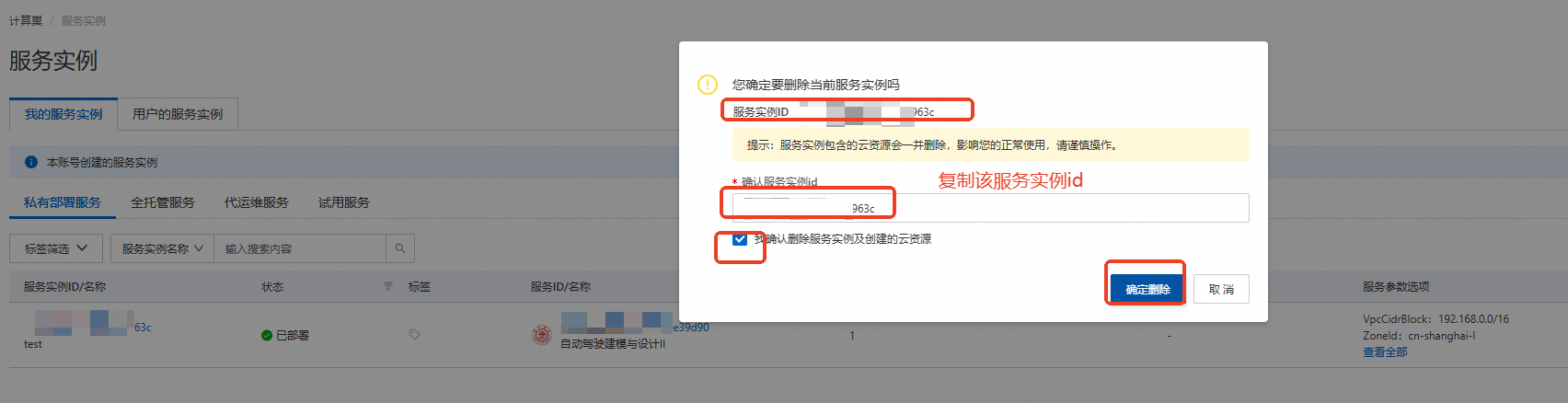
在弹窗粘贴 服务实例 ID, 并进行 勾选,点击【确定删除】
-
完成安全验证后,即可成功释放实例。
-
回到云服务器 ECS——实例,检查是否成功释放资源


关闭实验
-
在完成实验后,如果无需继续使用资源,选择 不保留资源 ,单击 结束实操 。在 结束实操 对话框中,单击 确定 。
-
在完成实验后,如果需要继续使用资源,选择 付费保留资源 ,单击 结束实操 。在 结束实操 对话框中,单击 确定 。请随时关注账户扣费情况,避免发生欠费。
该文章对您有帮助吗?