

关于Quadratic Programming(QP)算法和NMPC求解器(SQP)的研究

近期准备对QP、SQP进行深入总结和结尾,在对理论整理、测试和验证的过程中,想到之前的工作和事,不由的想发表几点想法。
一、QP问题分为好多种
1.无约束QP
2.等式约束QP
3.线性不等式约束
4.二次不等式约束QCQP
5.其他(整数或二值类型)
合理的选择问题转化形式,很重要。
二、不同类型的QP问题,耗时也不同
在QP优化求解中,最头疼的应该就是无解和耗时。之前也有提过优化算法分为问题转化和问题求解,两者决定了最终的耗时。
之前在MPC项目里,使用了MPC的变形——增量MPC。根据线性系统的特性,通过对线性模型的两个时刻相减就可以得到增量模型。它带来的好处是可以通过限制增量值来约束原求解问题的变化率,从而减少相应的不等式约束的数量,达到减少耗时的目的。如果有过对QP耗时分析的话,就会明白减少约束数量对减少QP耗时的影响之大。
三、优化耗时的权衡
QP求解耗时主要有两个——矩阵逆运算和约束,上述优化了后者,但是增量MPC的模型相对于原模型会增加,从而导致矩阵逆运算耗时的增加。
四、QCQP的应用
当前大多数开源库都不支持二次约束二次规划(QCQP)的问题求解,这不代表它没有用途,在使用优化算法求解绕障轨迹时可能会用到。Eigen的扩展库有提供部分场景的偏导求解方法,可以用于QCQP的求解。
五、个人能写出比开源更优秀的 QP求解库?
在晋升第一次被问到时,我也曾质疑过自己的选择,不过自己还是坚持下来。后来从写QP求解,到耗时对比,再到扩展QP求解库,还是很感动自己能坚持下来。
最后,还想说一点:术业有专攻,当下的osqp很流行,但是它肯定不是万能的,它的耗时优势大部分来源于qpoases。对于稀疏问题(规划常见)的求解,它的耗时不一定是最少的。
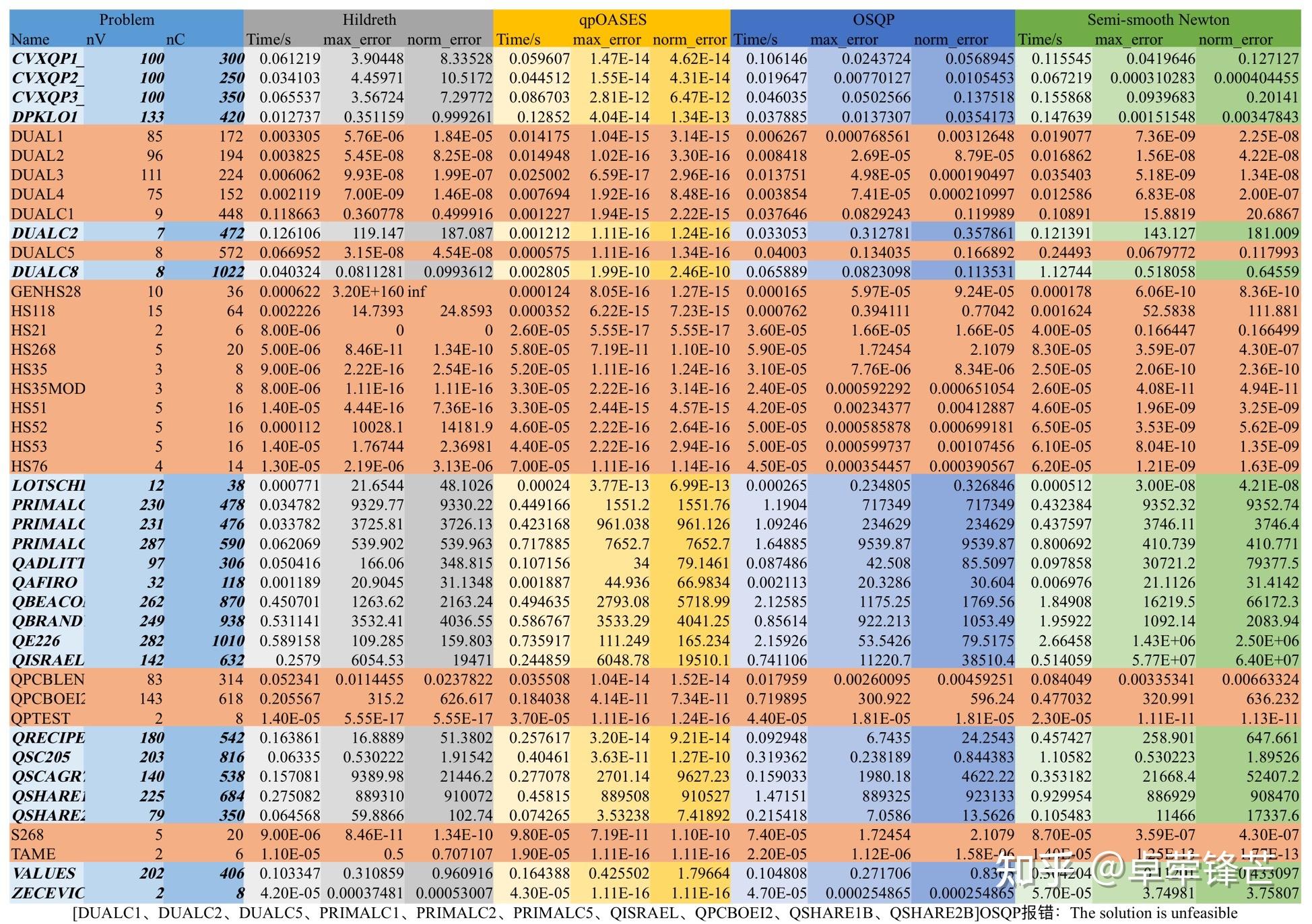
对osqp和qpOASES的耗时对比如下图
说明:
1.把原测试集中的所有不等式约束,统一转化成Gx≤r。
2.耗时使用ctime计时。
3.osqp库使用的是Eigen-osqp。
4.测试结果表明osqp计算是快,但是精度一般,并且,并不是osqp在所有用例中都快于qpOASES。
5.测试集覆盖Hessian不正定的情况,实际上在规划控制中,大部分场景都是保证Hessian是正定的(除了非线性规划)。
6.后面有时间的话,构造或找些规控特定的测试集,进行针对性的耗时评估。
2022-02-23 补充自己写的两种算法和主流的两种算法的计算结果。

早在2019年就开始研究nonlinear MPC,当时分了两条路线:一条是使用开源库,快速验证;另一条是自己研究求解过程。
对于第一条线,迫于大环境方案和开发进度,自己一个人断断续续搞了一年多,最终在低速场景、低硬件平台上跑起来了。当时,在仿真环境中完成初步调参,实车上再进行微调,在相同路径的情况下,NMPC输出的曲率相对于Lattice完美平滑;在初始位置存在横向和角度偏差时,NMPC所允许的偏差远远大于Lattic(>67º和>1.8m,低速<3m/s)。
第二条线,由于需要自己摸索,相对坎坷。至今虽搞清楚整个计算流程,使用开源QP或自己写的QP进行测试,发现泛化能力极差。虽然可能与权重,参数相关,但是自己对细节的处理,肯定不如开源库,比如非正定Hessian处理、偏导计算、积分操作、Objection的设定等等。一开始决定各个击破,就先从偏导开始,准备使用专业的积分偏导库——casadi。先对比积分和偏导的结果,发现自己写的和casadi结果一模一样,但是casadi的耗时却是自己写的10倍以上,官方提示生成c代码的话,可以提高4-10倍速度。在使用casadi的c++接口,实现代码生成时,要么编译提示该功能函数不支持代码生成,要么提示该继承类没有该代码生成函数!!!搞了近一周,搞得头疼。真是从入门到放弃!!
决定暂停这条路线了!
为了工作和生计,专心POMDP的决策开发了。
——2022-03-11
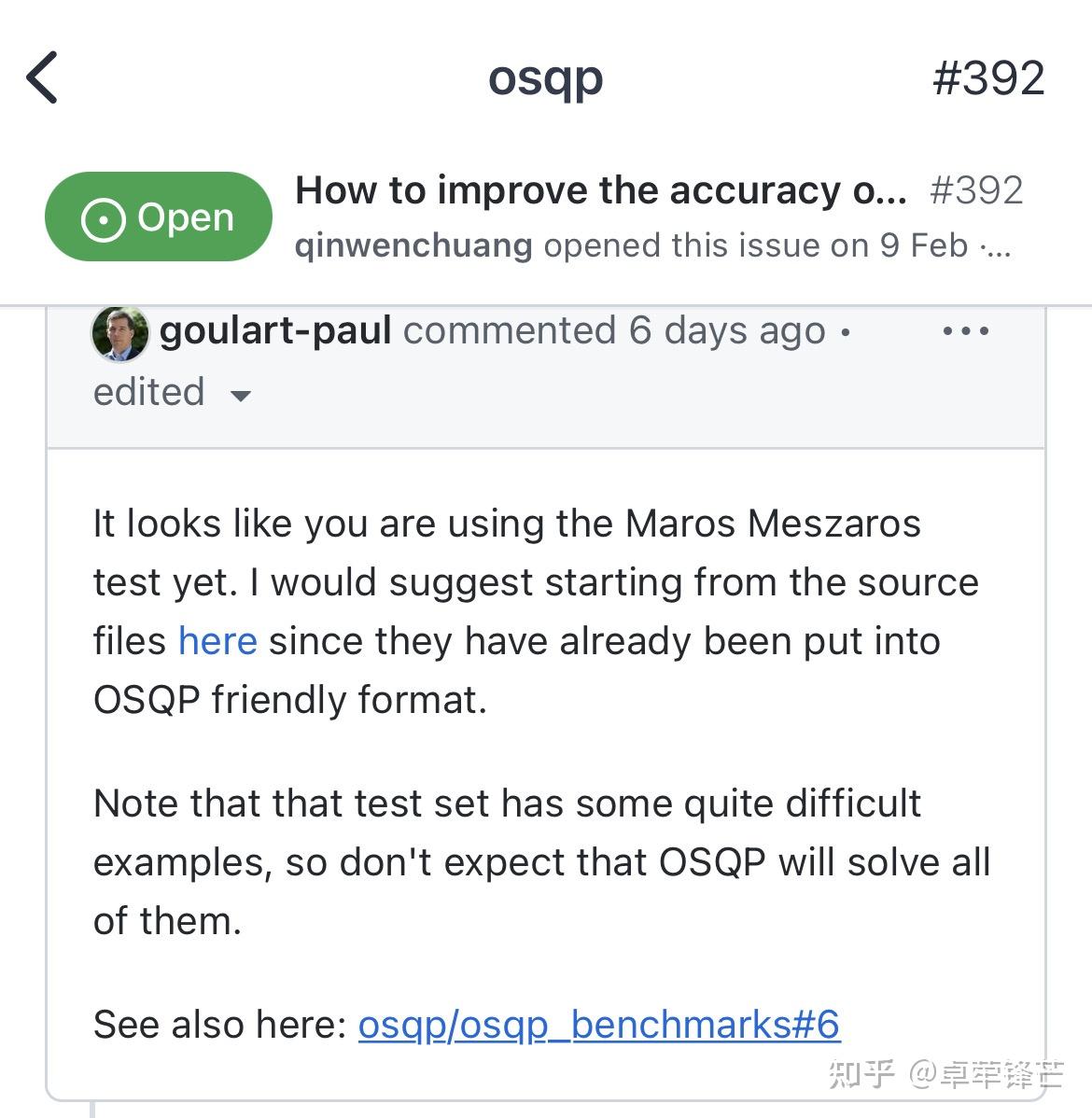
关于osqp精度的问题,在github上问了开发团队,综合来看,我的建议是开发初期不考虑耗时的情况下,先使用qpOASES验证算法开发和性能,后续再迁移到osqp。

——2022-03-25
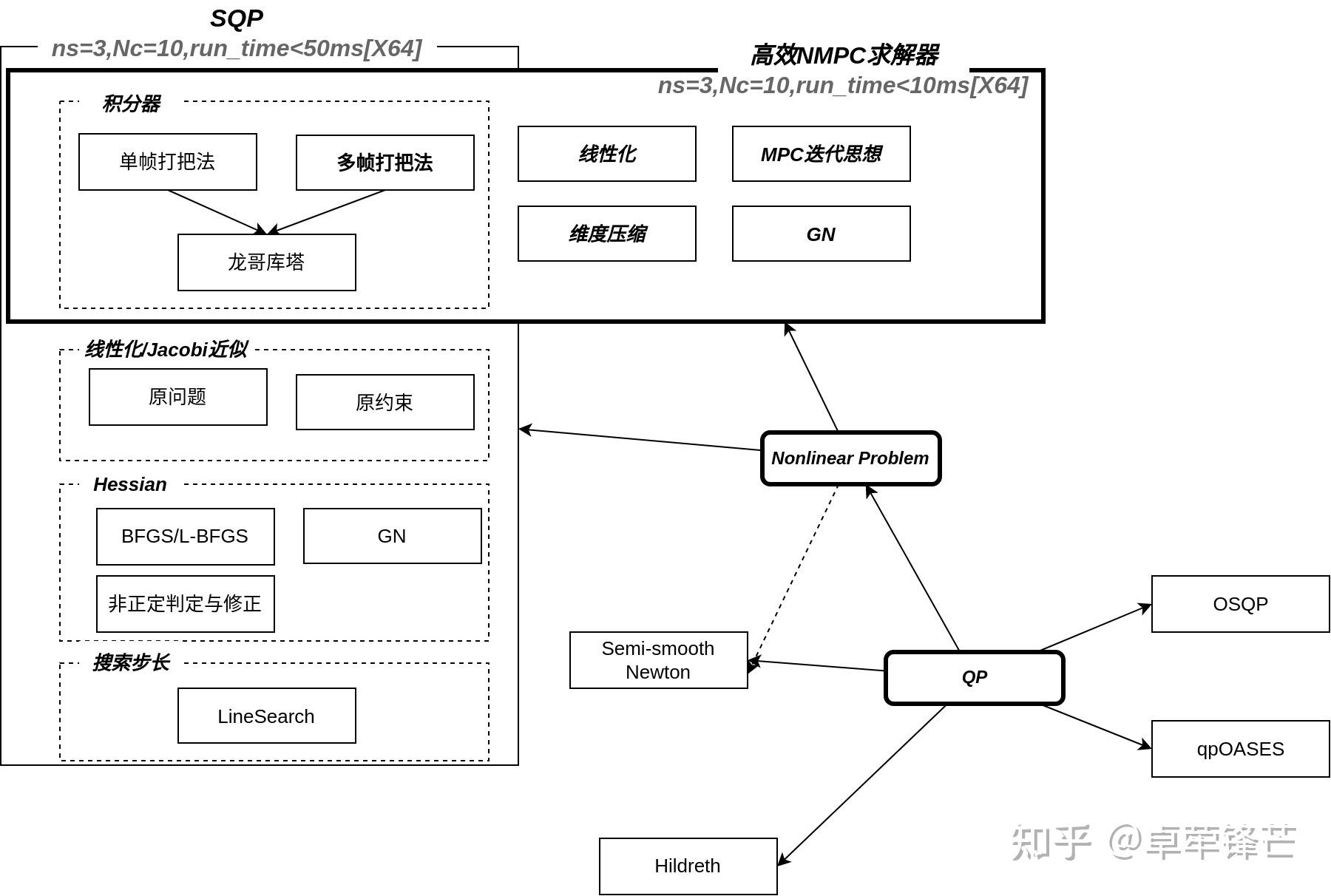
相对于凸优化,Nonlinear Problem求解可算是复杂的多,面也广的多。总结下来,自己也算是掌握了好几种方法:¹半光滑牛顿法,²一般SQP算法,³随机分形搜索。实际上主流求解非线性问题的方法就两个:SQP和内点法(初步了解半光滑牛顿法和内点法是一类)。
对于第三种算法:随机分形搜索算法,当时研究和开发它的初衷是替换RRT*或A*,用于无引导线下的规划算法,他本质属于全局优化算法,可以解决优化问题,不论是QP问题,还是非线性问题。实测中,只要迭代足够,最终收敛于最优值。后来想想,它也可以解决多障碍物绕障的问题。由于时间有限,和C++标准库的随机函数有限,就不再专心优化了。
在SQP上,自己摸索和补充了好多,终究实现了全流程。在应用于路径规划时,发现耗时和收敛性都达不到预期,一开始以为偏导的近似存在偏差,可能影响收敛结果。于是苦心研究Eigen的偏导工具,放在SQP求解中没发现性能提升!出于严谨性,对Eigen工具和近似求解进行实例对比,发现结果一模一样,当维数增加到10以上时,eigen工具的耗时更少,除此之外,没啥进展。
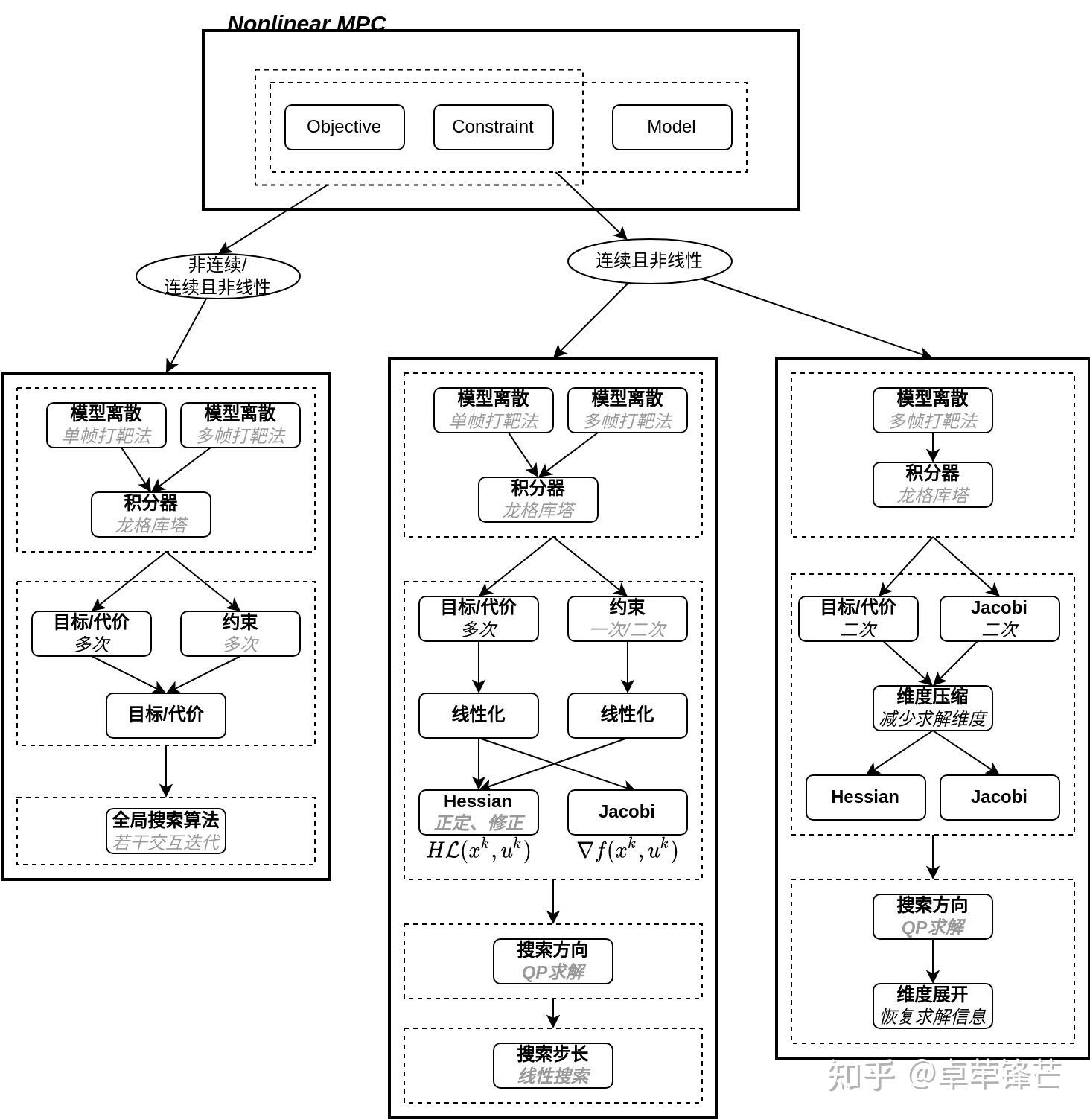
后来又抽时间查阅众多论文,发现NMPC就是NLP的一个子集,不能用泛式求解方法求解NMPC问题。对于NMPC问题,还不算是高度非线性,不能就简的使用近期求解,除了Hessian矩阵必须近似外,其他过程均需要手动求解,只有这样才能保证实时性和可靠性。
接下来就是潜心研究和验证了,等这块完成,就彻底放弃路径规划的研究,专心决策算法开发了,否则会感觉一件执意很久的事没有善尾。
——2022-04-05
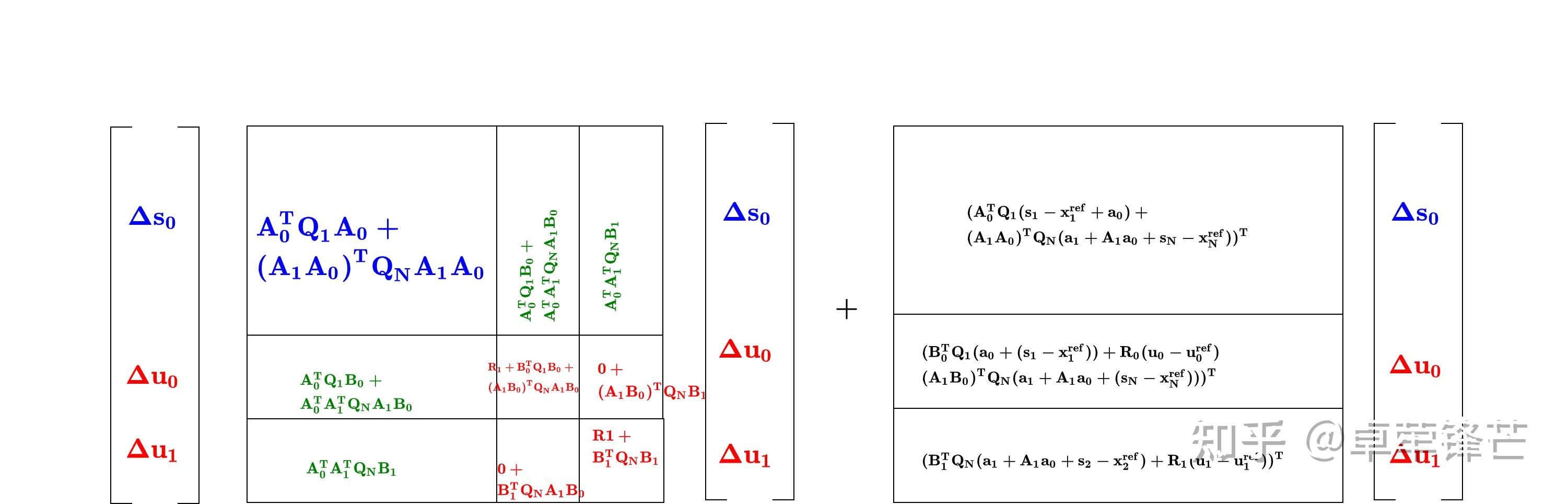
更高效的NMPC(Nonlinear MPC)求解,今天终于有眉目啦,通过不断的推导和尝试,其中的核心求解部分终于对的上了!接下来就是补全整个求解过程了。功夫不服有心人。

——2022-04-15
如果说QP求解是控制算法专属,那么SQP求解就是规划算法的专属。从2019年开始就认定优化算法是自动驾驶规划算法的最优解,后来又在项目里验证了其的优越性,从此就开始对其的求解原理进行研究,希望手写一套可行的求解器。
由于这部分内容能找到的且有用的资料很少,导致这个过程充满曲折和漫长。
重要阶段一:非光滑牛顿法算法。这个算法适合非线性求解,但是Hessian矩阵不稳定,总会出现NaN。该算法可以降维解决QP问题。
重要阶段二:正规的SQP算法。期间搞明白了SQP算法的思想和流程,最大的收获有Hessian正定的判定和解决、线性搜索确定步长保证递减性、验证二次约束的可行性、研究和应用了Eigen库的偏导求解……。在应用该算法解决路径规划时,发现Single-shooting+Runge-kutta的方式收敛差,Multiple-shoot+Runge-kutta的方式计算量大且权重难调。
重要阶段三:一般的SQP求解器,其偏导和Hessian矩阵均是近似的,这虽可以泛化它的应用场景,但可能导致它不收敛或收敛的慢。对于路径规划问题,一般可以转化成NMPC的问题,NMPC虽然也是非线性问题(Nonlinear Problem),但是由于其objective的特殊性,可以类比MPC进行求解,该方式可以减少不必要的近似求解。在x64平台,预测时域10,控制时域10,模型维度3,控制维度1,qpOASES的最大迭代20,sqp最大迭代20,的前提下,得到稳定求解结果,耗时只需要9~10ms,如果使用osqp耗时还会减少。
下面给出一些结果吧(没调参,只验证说明收敛性)。

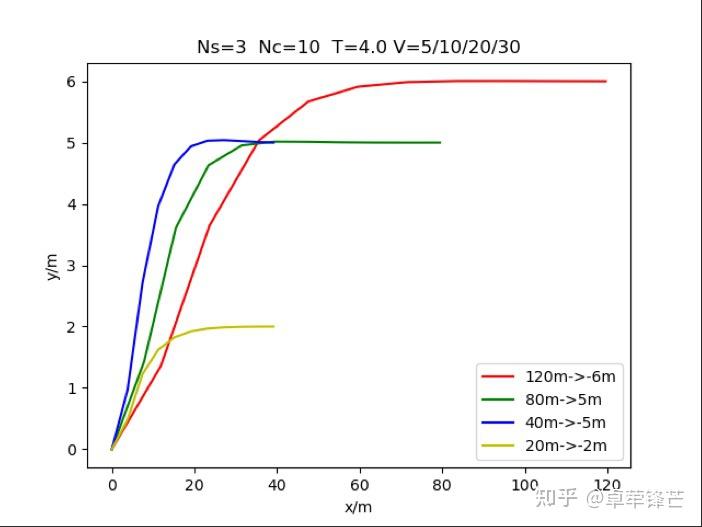

——2022-04-27
大概在2017-2019年期间做自动驾驶的控制算法开发,从纵向控制做到横向控制,期间积累了一套自己的算法,和一套解决实际问题的思路和方法,总体来说,对控制算法的开发还是相对游刃有余的。后来转规划算法,自我感觉选了一个对的方向,但是一直堵塞于求解器开发—一套白盒规划算法,不依赖于外部求解器。该问题直到清明节期间才彻底解决,在和开源求解器的结果相同的前提下,耗时也接近。
后来又转决策算法的开发,至此,该文章接近完结,下面也附上基于自己理解的总结吧。

——2022-05-30
再做一些必要的对比补充吧。
耗时 :至强cpu:W2191B,耗时9ms~10ms;笔记本cpu:1195g7和10210u,耗时3ms~5ms。
精度 :和开源求解库 ACADO(nmpc代码生成) 的结果一致或者相同。
对比 :通过ACADO代码生成工具得到的代码是C代码,不方便维护和进一步扩展开发,并且生成的头文件代码存在小问题。
可优化点 :Eigen矩阵的拼接和更换osqp求解器。其实,好多开源项目的计算,都会大量使用STL存储数据和循环计算,我是感觉灵活使用Eigen可以大大提高算法效率。
——2022-09-29
在写另一篇文章时,发现最近两三年的权威论文(ACC、CDC、Ford等)都在使用NMPC+CBF(Control Barrier Functions)的算法解决障碍物的避障轨迹规划。CBF以约束的形式被添加到NMPC里,具体细节和形式可自行ieee搜索,值得一提的是CBF包含二次项,最终的NMPC的约束会有三类:控制量的约束、状态的约束和状态的非线性约束(二次只是其特例)。
1、控制量的约束,最为简单。需要注意的细节是,在SQP中的QP的求解量是原控制量的增量,施加约束时需要做一个简单的加减法。
2、状态的约束,稍微复杂一点。非线性模型经过泰勒一阶展开,再进行前向滚动递推后,状态的增量与控制量的增量有一个线性关系,再把状态的增量转化成状态。最终,状态的约束先转化成状态增量的约束,然后转化成与控制量的增量相关的约束。
3、关于状态和控制量的非线性约束,最为复杂。其思路也很清晰,首先非线性约束需要泰勒一阶展开,问题转化成增量的约束,然后就变成2中的过程了。该约束相对于2多一步偏导的计算,这个偏导就是非线性约束到控制量之间的链式偏导的一环。描述的很复杂,公式求解上就是矩阵的一个乘法运算。
根据应用场景的需求,NMPC需要扩展到二次约束,这是该文章之前未提及的。从近几年的权威期刊的论文方向来看,NMPC及其衍生算法应该是规划控制的最优解,除此之外,该算法同样可以应用在机器人等领域。
——2022-10-20
对于多障碍物避让或交互规划可参考另一文档【 卓荦锋芒:Global/ Interactive规划算法:CHOMP 】
——2022-10-23
根据这几天的研究和测试发现,在追求极致耗时的工程应用方向,还没有找到一个免费的开源NLP求解库,可以很好的解决NMPC的避障问题。除此之外,基于凸优化的避障算法开发的门槛很高,不局限于NMPC算法。针对上述的两个结论,补充下自己的看法。
第一,显而易见,普通MPC和Frenet-QP都不能实现定量的避障,所以无法泛化到复杂场景。上面也有提到NMPC的优势:NMPC的模型可以是非线性的,可以减少模型的过度简化带来的失真;约束对象可以是控制量和状态量,约束形式可以是非线性的,比如,正余弦、正余切、平方和,乘积等,有了这些优势,可以很容易添加状态边界约束和障碍物约束。对于约束,还可以细分点约束(Point Constraints)和线约束(Path Constraints),点约束就是约束某个特定范围,线约束可以理解成连续约束,比如,x*y*heading*theta<1.0。NMPC-CBF会使用到点约束和线约束,对于这么多的约束形式和类型,一般的开源库的代码生成工具很难做到面面俱到。
第二,主要影响QP收敛的因素是约束。普通QP问题的约束对象只能是控制量,所以其约束出现互相干涉的可能性很小。对于NMPC而言,其应用场景越复杂,约束越多且复杂,出现干涉的可能性越大。举个限制Vy和Ay例子:v*sin(heading)和v*dot(heading),前者是状态量的线约束,后者是控制量的约束(速度v是常量),且包含车辆动力学模型,若车辆模型存在错误可能导致无解。最恐怖的是,若权重、参考值、初始值等没有配置好的话,会出现换个速度v值就无解的情况。这就是挑战与机遇并存吧。
——2022-10-25
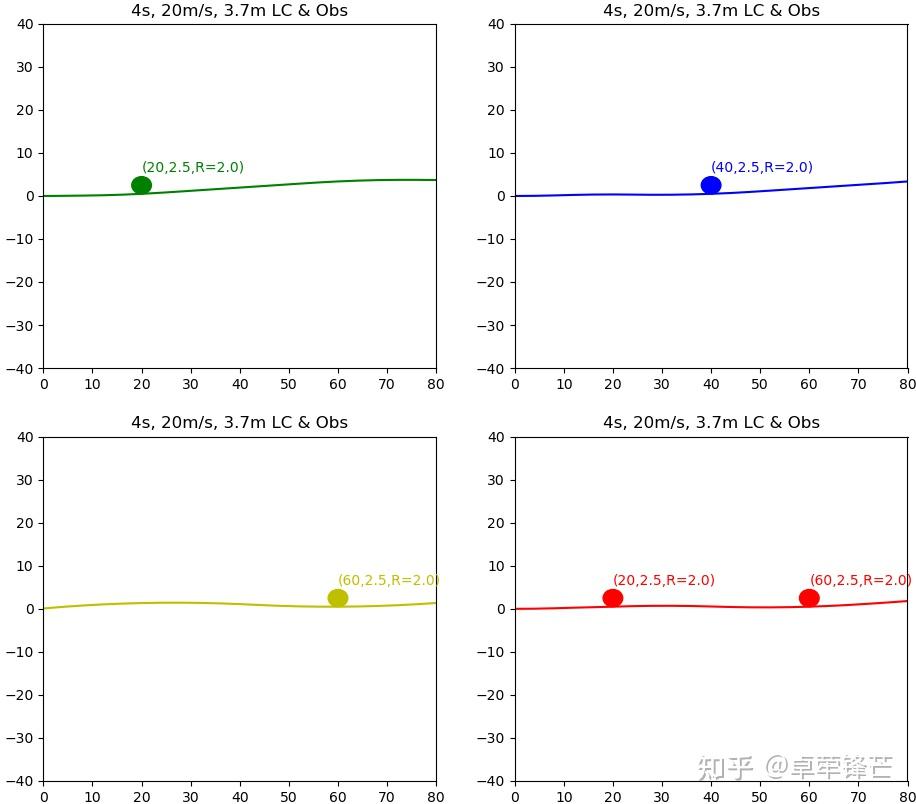
根据周末的开发,在完成NMPC-CBF之前,使用NMPC+二次约束的形式实现换道避让(单/多障碍物),感觉效果还行。
自车信息:T=4s,V=20m/s,Y=3.7,|Vy|<1.5m/s,|Ay|<1.5m/s2;
障碍物信息:形状为半径R=2m的圆,分别验证三个位置;验证2个圆形障碍物;
计算信息:模型维度3,离散20点;
平台:Ubuntu20.04 + i7-1195G7@2.90GHz×8 + 16GB;
耗时:平均7ms, 最大<10ms。

--2023-01-05
前几天在研究DDP/iLQG时,忽然发现基于时域的NMPC+多个二次约束,在拥堵/城市场景下,很适合动态障碍物的轨迹规划。
参阅近两年的论文,发现还有两个主流可行的方向:DDP/iLQR/iLQG和基于Differential Flatness(微分平坦)的循环样条优化[ICRA]。这两类算法虽然可行,但考究其求解耗时及求解稳定性的话,还是不如NMPC的。从最近的论文及经验来看,NMPC应该是轨迹规划的最优解。
--2023-03-15
还是有很多人看这个文章的,那我也更新下吧。
几乎所有的planning算法都趋向于QP优化求解,所以决定深入研究下与这块相关的开源求解器。当下有很多QP的开源求解器,相对主流的也就两个: qpOASES和OSQP。OSQP的性能优势与稀疏问题强耦合,在很多文献里OSQP的性能并没有qpOASES好,并且qpOASES还并未针对稀疏问题进行优化,除此之外,还有商用的案例,总体而言,qpOASES的性能天花板更高,适合扩展和维护。就开源代码而言,qpOASES的代码更干净和纯粹;就算法类型而言,Active Set要比内点法更快。综上,如果时间充裕会深入研究和优化qpOASES。
qpOASES在求解搜索方向时,使用了Cholesky分解进行矩阵求逆,Eigen也提供了该分解方法,并且指出该分解的速度和精度都是最高的。该库使用c语言实现了该分解,并没有调用第三方库,出于好奇就决定对比其与Eigen的性能。得到如下结论:
Hessian的尺寸10×10,Eigen的单次耗时是C的2~3倍,Eigen的100次耗时和C接近。
Hessian的尺寸50×50,Eigen的单次耗时和C接近,Eigen的100次耗时是C的1/2~1/3。
Hessian的尺寸100×100,Eigen的单次耗时是C的1/2~1/3,Eigen的100次耗时是C的1/2~1/3。
Eigen能在高维度矩阵的计算占优势,即使C计算已经足够精简了。通过对比观察生成的可行性文件,发现Eigen会多占用将近20k的空间。
––2023-04-04
今天就更新点整体上的理解吧,
1、求解器分为两类:接口丰富的和Embedded。前者偏向于新手、开源库、快速实现和调试,后者偏向于有经验、商业库、追求极致耗时。Embedded库的耗时可以降低60%,甚至更多。
2、构建NMPC问题时,如果使用了维度压缩,即Hessian不是稀疏矩阵,首选qpOASES,因为它求解耗时稳定、精度高、可以使用对偶解加快求解。面对一个限制横向距离、限制横向加速度的换道规划问题,限制20次QP迭代,osqp的整体耗时是qpOASES的2倍多!(即使不使用对偶解,也比osqp快;qpOASES优化了设置,Osqp-Eigen默认设置)
3、鉴于近期的测试,后续研究的基准就是qpOASES了。针对偏规划的想法,比如Frenet–NMPC等,更新至另一文章了。
--2023-08-13
这块近期也没有什么进展,就总结下Nonlinear Problem的另一个解法-半光滑牛顿法(Semismooth Newton)

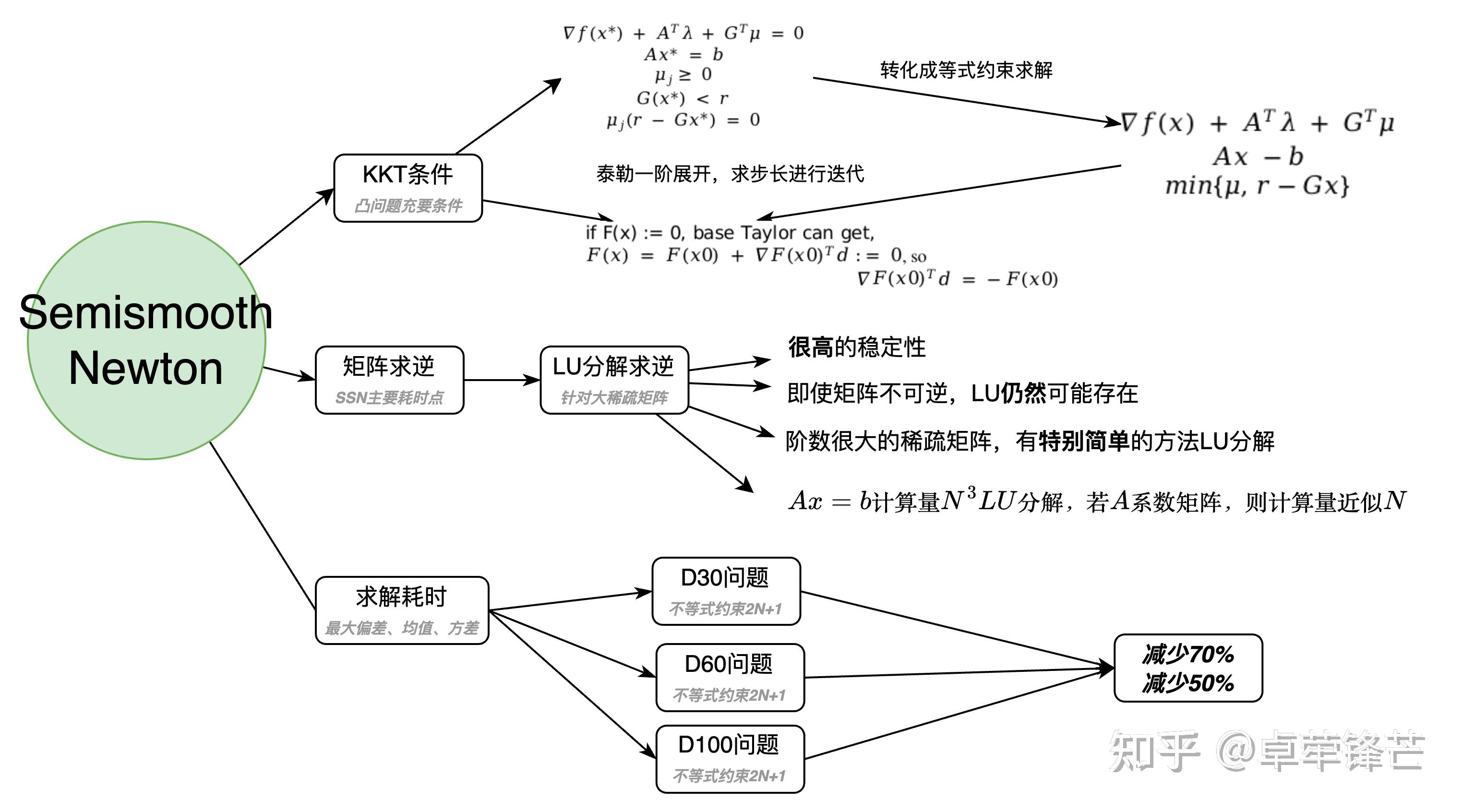
Semismooth Newton是研究非线性问题求解器的第一阶段的产物,它虽然是非线性问题的求解器,但是也可以作为QP问题的求解器,早在2021年就拿它和OSQP、qpOASES做过对比。

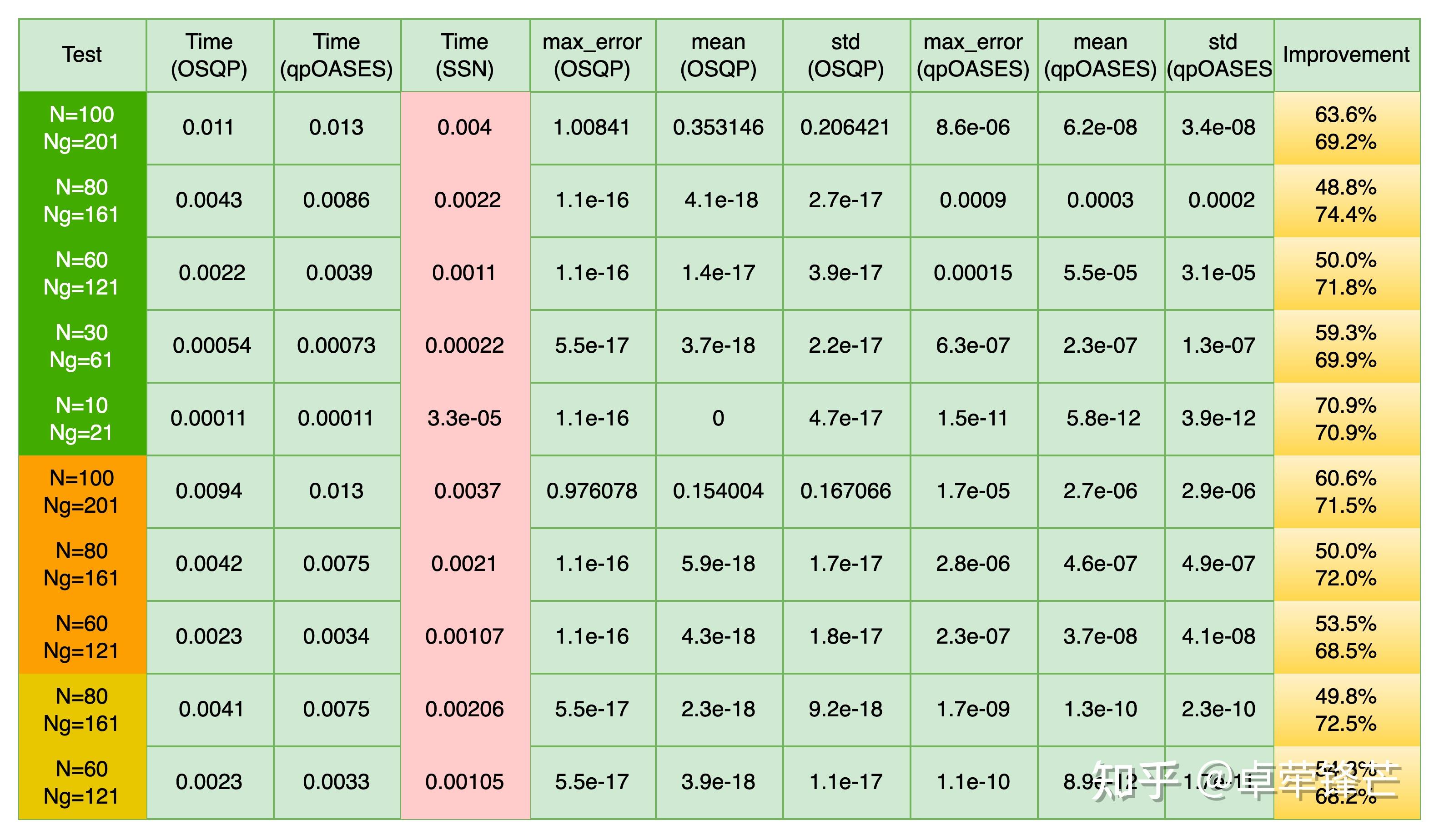
补充说明:
- 对比使用的QP问题是临时构造的,并不是普遍认同的测试集;
- Test列中N为Hessian矩阵的维度,默认为对角线矩阵;Ng为2N+1个约束,其中2N是对U的上下界约束,1为线性约束;
- OSQP和qpOASES都是默认设置;
- 测试结果表明,Semismooth Newton有超预期优势,但不排除和测试用例有关;
- 对于这个结果,当时也没有更深入研究,后续也没有使用公认测试集再测试,毕竟属于第一阶段的产物,也算是昙花一现。
