xvfb-run -s "-screen 0 1400x900x24" bash
就按照官网的教程来即可。可以看到record啦 😉

安装了spinningup,which supports python3.6,对应安装了gym 0.15,mujoco-py1.50
refermujoco-py1.5的branch注意,对应的python是3.5的 ,但是spinningup只支持3.6版本及以上的 TATgymmujoco-py还是得安装1.50的版本,2.0的不work
之前我是在服务器上,然后转移到本地机器无此报错
unable to execute ‘swig’: No such file or directory error: command ‘swig’ failed with exit status 1
没有安装swig
DRLib:一个简洁的强化学习库,集成了HER和PER
My DRL library with tensorflow1.14 and pytorch, add HER and PER, core codes based on https://github.com/openai/spinningup
求star,欢迎开issues!
主要的框架,基于spinningup。
目前分享出来的有,tf1和torch版本的主流offpolicy强化算法,DDPG,SAC,TD3,对每个算法都增加了非常简洁的*
1、 在我们这个游戏中,我们的状态由 4 个数字组成:底部小车的位置,小车的速度,杆的位置(以角度表示)和杆的角速度。
这 4 个数字都是给定的数组(或向量)
理解状态是一个数字数组意味着我们可以对它进行一些数学运算来决定我们根据状态采取什么行动。
2、 点积
两个数组(向量)之间的点积简单地将第一个数组的每个元素乘以第二个数组的对应元素,并将它们全部加在一起。假设我们想找到数组 A 和 B 的点...
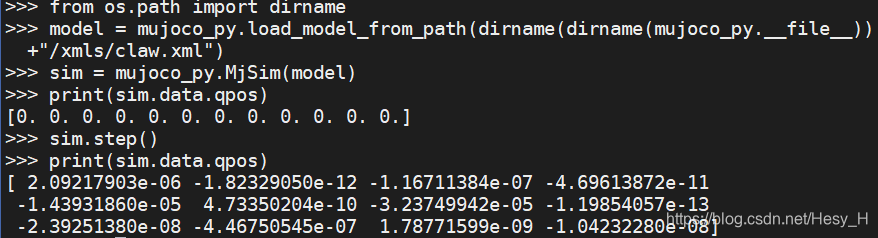
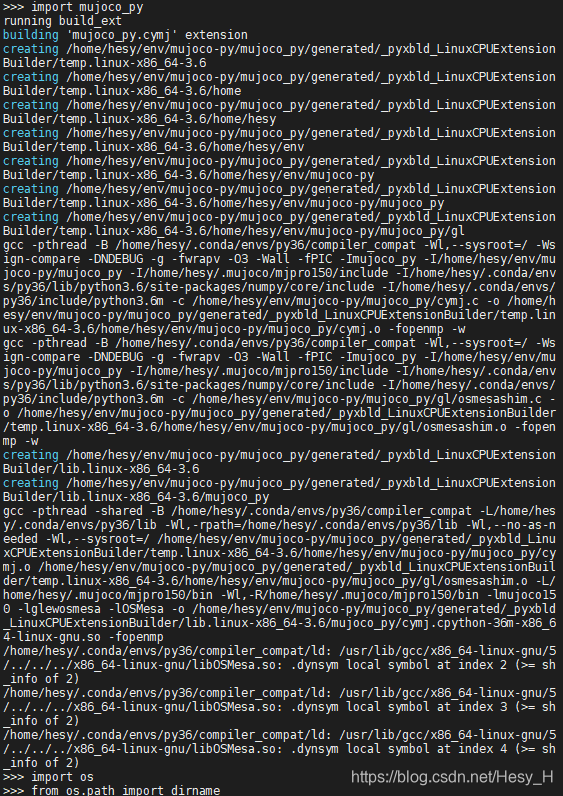
Mujoco 安装
1.MuJoCo是一个物理模拟器,可以用于机器人控制优化等研究。
官网下载MuJoCo 2.0 对应平台的安装包:https://www.roboti.us/index.html 中的 mujoco200 linux安装包
mkdir ~/.mujoco
cp mujoco200_linux.zip ~/.mujoco
cd ~/.mujoco
unz...
此博客仅为个人学习时的汇总笔记
在ubuntu系统中,白天与晚上的最快源不一定一样, 当感觉update更新速度变慢以后可以考虑在"软件和更新"中换源.
1. pip安装提速
pip安装时,使用语句pip install package_name -i https:/
dyld: Library not loaded: @executable_path/../.
Python
Referenced from: /Users/chenyong/Applications/
py-env/
py3-common/bin/
python
Reason: image not found
Abort trap: 6
最近在搞sip视频通话,选的是开源工程csipsimple工程。csipsimple用的sip协议栈是pjsip,也是一个开源的协议栈。多媒体协议栈用用的是开源的pjmedia。同时为了支持更多的音视频编解码,还引入众多开源编解码工程,如ffmpeg, silk, g726, g729等等。一路将在Ubuntu10.04系统上编下来遇到的问题总结如下:
1、没有按照要求搭建好环境,这部分内容,参
我们知道
python 本身提供了界面库和多媒体库,但是确实不好用。
我们在界面的时候可以使用
PyQT库,和xWidget。而开发多媒体的时候则用本文提到的
pyglet库。先来看看这些特性:
扩平台,支持windows, Max OS, Linux可以创建任意多的窗口,支持多监视器和开发全屏游戏可以操作几乎所有格式的图片可
调用绘制的时候,glGetError()返回了GL_INVALID_OPERATION. 有幸读到某篇中文文章点击打开链接,说到可能是因为使用了没有设置的纹理,查看一下果然在shader里针对shadow
map调用了tex2Dproj.去掉这个调用,就不报错了. 文章中所说内容给了我启示,同时我也对文章所说有所怀疑,希望大家也能对一切未知事物抱有怀疑态度,不盲从.
在官网注册https://www.roboti.us/license.html,选用教育邮箱免费注册那一栏。填写相关的基本信息。填写好所有信息之后点击Request license按钮,之后等待接收邮件,邮件里面会有Account Number。
之后开启漫长的等待过程。
之后需要填写接收到的Account Number到下图所示的框框中。
Computer ID运行文本框右侧对应平台的应用程序自动获得,命令如下:
chmod +x geti
荷西·H:
java、c (c++)、python 这些语言都有其适用的场景,没有说哪一个一统天下。至于他们为什么能火,各有千秋:性能好 或者 入门简单 或者 平台迁移能力强 等等。
另外,只能说目前没有更好的语言产生,历史上也有很多红极一时的语言/软件随着新的语言/软件出来以后市场份额就迅速减少了。
python trick
programmer_ada: